


Multi-channel laser beam combining and closed-loop correction technology in visible light band
-
摘要:
为了实现可见光波段多路不同波长金宝搏188软件怎么用 的周期性闭环校正,设计了一种具有光束指向和位置偏差独立监测与调节的金宝搏188软件怎么用 合束系统。首先,根据系统的应用需求,提出了合束系统的设计指标与整体合束方案。然后,在合束方案的基础上,建立了合束系统的光束控制模型,并通过数值仿真得到了合束系统光束控制的解算方法。闭环合束系统通过光束指向和位置监测装置分别实现合束金宝搏188软件怎么用 指向偏差与位置偏差的独立监测,并根据监测结果进行光束调节装置控制量的解算;进而通过两维摆镜和一维平移台分别实现光束指向和位置偏差的独立高效调节。最后,采用两路不同波长的金宝搏188软件怎么用 束,配合光束监测与调节装置,搭建了闭环合束模拟实验平台,对周期性闭环合束系统的合束效果进行了验证。实验结果表明:在长时间的工作过程中,两路金宝搏188软件怎么用 均实现了与基准光路的精密合束,合束指向精度优于±7 μrad,位置精度优于±0.84 mm。本研究所组建的金宝搏188软件怎么用 合束系统不仅具有合束精度高、校正速度快、光路扩展性强的优势,而且可实现金宝搏188软件怎么用 束的周期性闭环校正,能够有效保证合束金宝搏188软件怎么用 的长期工作稳定性。
-
关键词:
- 金宝搏188软件怎么用 合束 /
- 光束监测 /
- 光束控制 /
- 指向偏差 /
- 位置偏差
Abstract:To achieve periodic closed-loop correction of multiple lasers with different wavelengths in the visible wavelength band, a laser beam combining system is designed. This system involves independent monitoring and adjusting of beam pointing and position deviation. First, according to the application requirements of the system, the design indexes of the beam combining system and the overall beam combining scheme are proposed. Then, based on the overall beam combining scheme, we establish the beam control model for the beam combining system. Through numerical simulation experiments, we obtain the solution method for beam control of the beam combining system. The closed-loop beam combining system realizes independent monitoring of the unit beam’s pointing and position deviation through the respective beam pointing and position monitoring device. The monitoring results are then used to calculate the control quantity of the beam adjusting device. The independent and efficient adjustment of beam pointing and position deviation is achieved using a two-dimensional swing mirror and a one-dimensional platform, respectively. Finally, a closed-loop beam combining simulation experimental system with beam monitoring and adjustment device is built using two laser beams of different wavelengths. The periodic closed-loop beam combining system is verified to have an effective beam combing effect. The experimental results demonstrate that over an extended operational period, both lasers achieve precise beam combining with the reference optical path. Furthermore, the beam combining pointing accuracy is better than ±7 μrad, and the positioning accuracy is better than ±0.84 mm. The laser beam combining system developed in this study boast high beam combining accuracy, a fast correction speed, and excellent augmentability for multiple laser beams. Besides, it can accomplish periodic closed-loop beam combining of laser beams, ensuring long-term working stability of the combined laser.
-
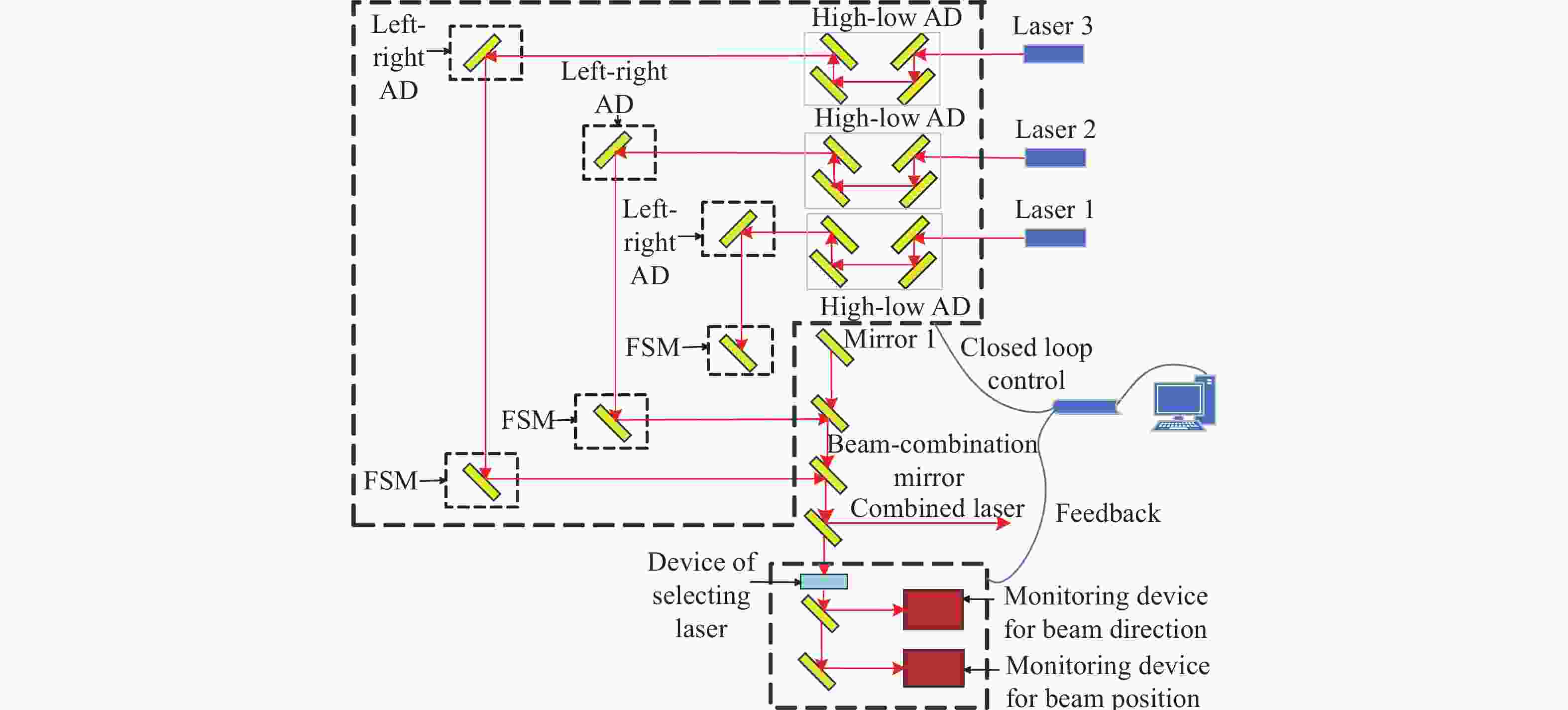
图 1 金宝搏188软件怎么用 合束及闭环校正系统整体布局
Figure 1. Overall layout of laser beam combining and closed-loop correction system
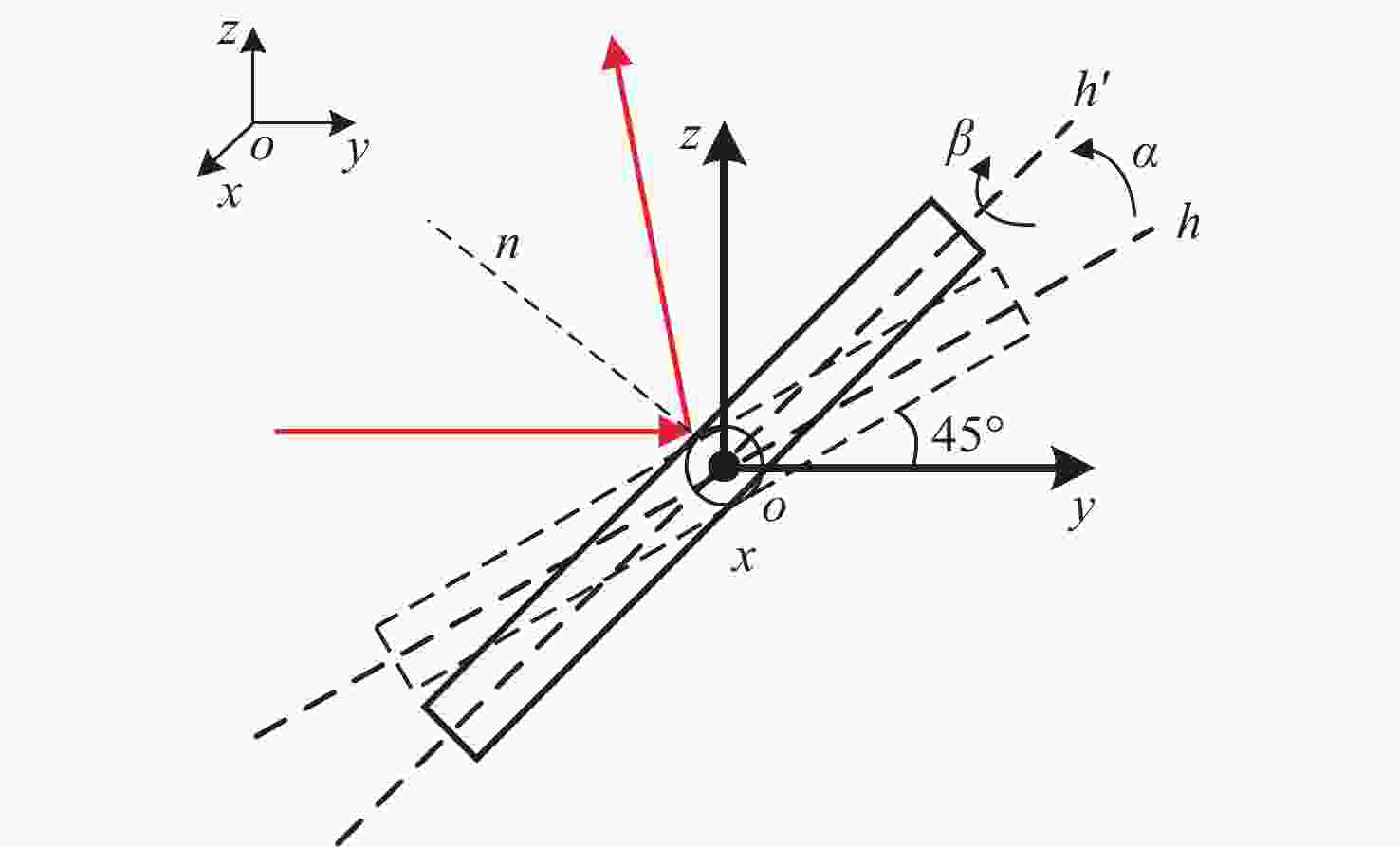
图 2 两维摆镜光束指向调节示意图
Figure 2. Schematic diagram of beam pointing adjustment by two-dimensional oscillating mirror

图 5 光束左右位置调节示意图
Figure 5. Schematic diagram of beam left and right position adjustment
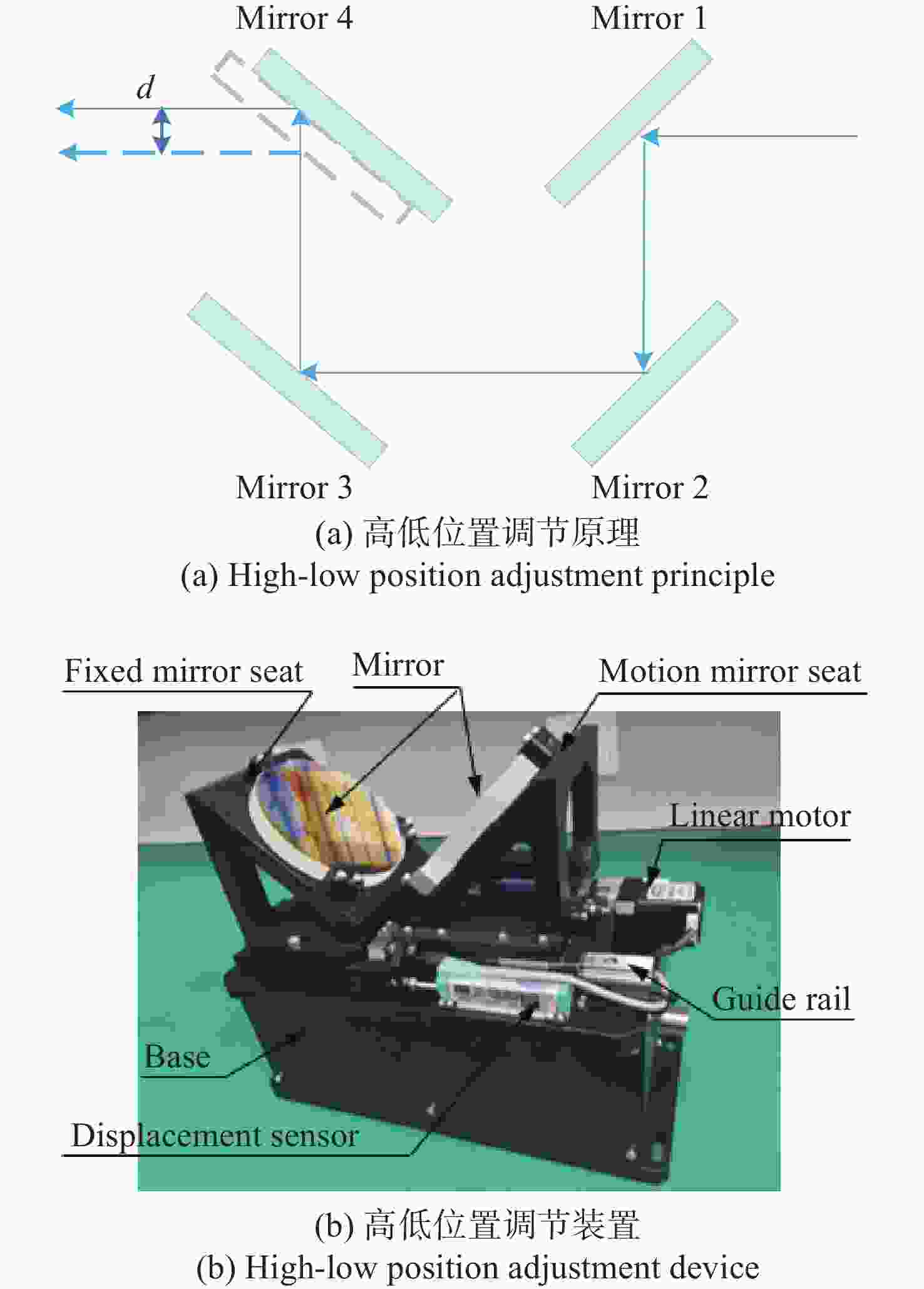
图 8 高低位置调节装置原理和实物
Figure 8. Principle and physical map of beam high-low position adjusting device
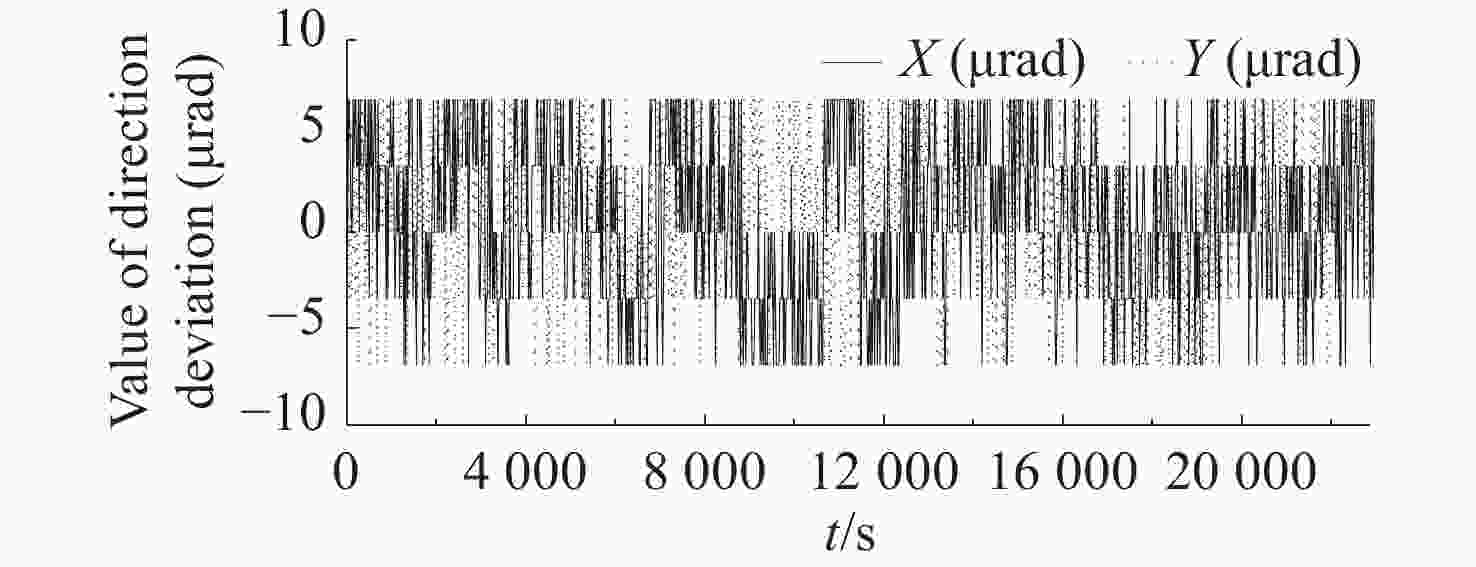
图 10 光束1周期性闭环合束指向偏差实时监测数据
Figure 10. Real-time monitoring data of beam 1 periodically closed-loop beam pointing deviation
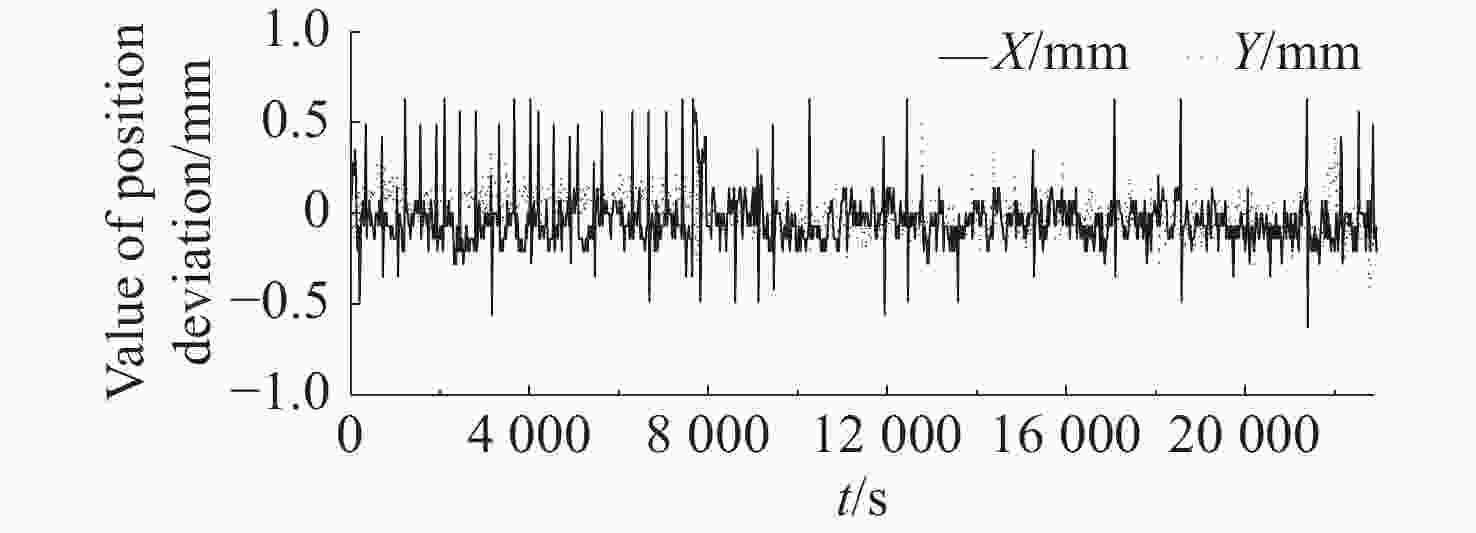
图 11 光束1周期性闭环合束位置偏差实时监测数据
Figure 11. Real-time monitoring data of beam 1 periodically closed-loop beam combining position deviation
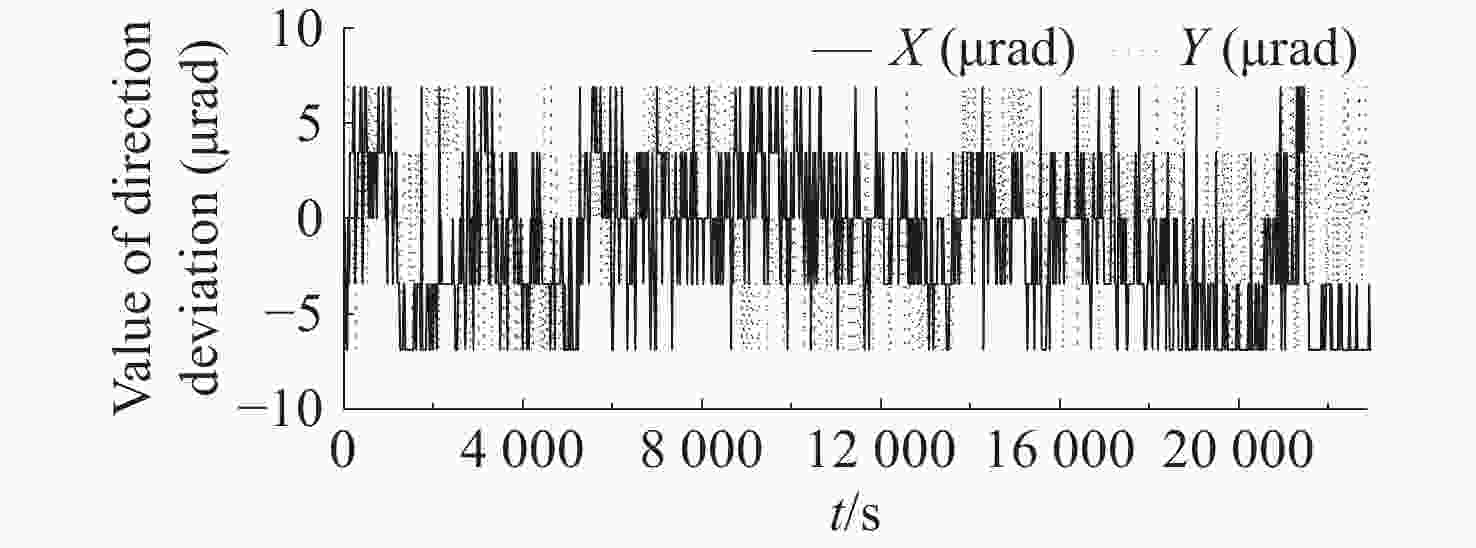
图 12 光束2周期性闭环合束指向偏差实时监测数据
Figure 12. Real-time monitoring data of beam 2 periodic closed-loop beam combining pointing deviation
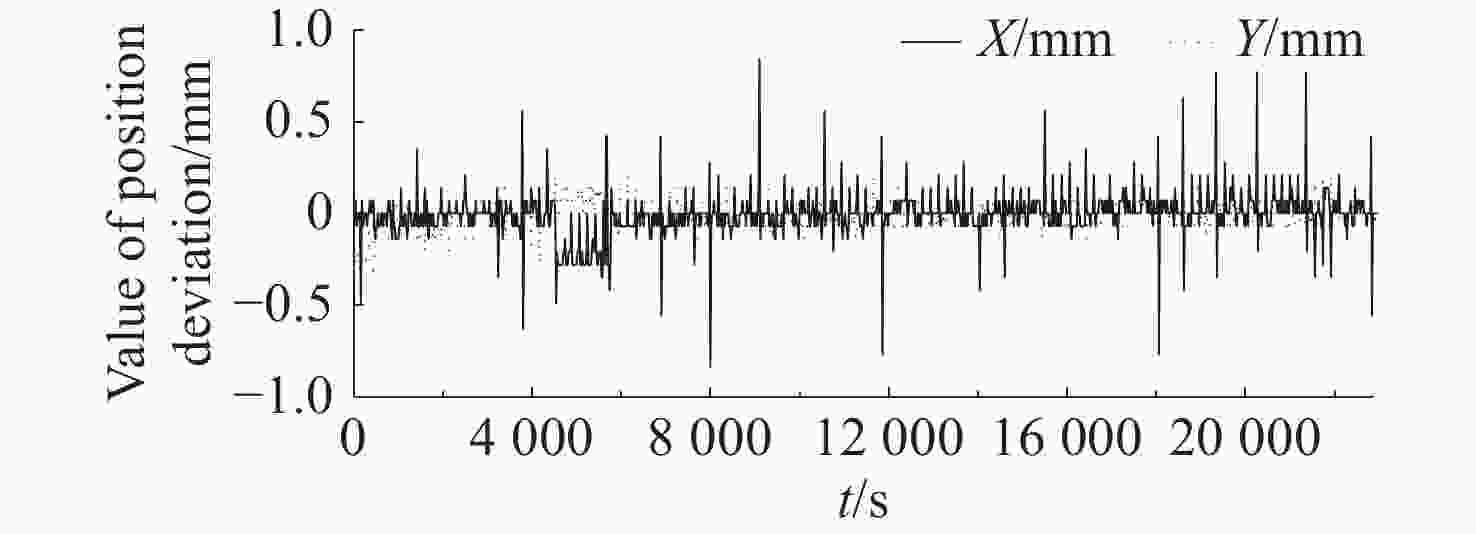
图 13 光束2周期性闭环合束位置偏差实时监测数据
Figure 13. Real-time monitoring data of beam 2 periodic closed-loop beam combining position deviation

图 15 合束系统光束调节部分的光路图
Figure 15. Optical path diagram of the beam adjustment section of the beam combining system
表 1 金宝搏188软件怎么用 合束系统设计要求
Table 1. Design requirements for beam combining system
Items Requirement Wavelength/nm 400~900 Aperture/mm ≥Φ40 Precision of directio/μrad ±20 Precision of positional/mm ±1 Direction correction range/μrad θx≥±600; θy≥±600 Positional correction range/mm ≥±7.5  下载: 导出CSV
下载: 导出CSV
表 2 指向调节仿真实验数据(单位:μrad)
Table 2. Pointing adjustment simulation experiment data
方位
偏差δy俯仰
偏差δx方位
控制量α俯仰
控制量βδy与2α
差值δx与$ \sqrt{2}\beta $
差值−1500 0 −749.886 0 −0.228 0 −1000 0 −499.992 0 −0.016 0 −500 0 −249.959 0 −0.082 0 500 0 249.958 0 0.084 0 1000 0 499.922 0 0.156 0 1500 0 749.886 0 0.228 0 0 −1500 0 −1060.652 0 −0.012 0 −1000 0 −707.099 0 −0.011 0 −500 0 −353.546 0 −0.010 0 0 0 0 0 0 0 500 0 353.546 0 0.010 0 1000 0 707.099 0 0.011 0 1500 0 1060.652 0 0.011 250 250 124.982 176.790 0.036 −0.019 500 500 249.930 353.630 0.140 −0.108 1000 1000 499.740 707.450 0.520 −0.485
下载: 导出CSV
表 3 左右位置调节仿真实验数据
Table 3. Simulation experiment data of left and right position adjustment
输入输出参数 数值 左右控制量(mm) 0.1 1 2 3 4 6 8 10 坐标变化量$ \Delta x $(μm) 0.224 2.249 3.699 5.249 6.598 7.499 8.899 10.512 坐标变化量$ \Delta y $(mm) 0.099 0.999 1.997 2.995 3.994 5.991 7.988 9.985
下载: 导出CSV
表 4 高低位置调节仿真实验数据
Table 4. Simulated experimental data for high and low position adjustment
调节参数 数值 高低位置控制量(mm) 0.1 1 2 3 4 6 8 10 坐标变化量$ \Delta x $(mm) 0.100 1.002 2.002 3.004 4.005 6.009 8.011 10.017 坐标变化量$ \Delta y $(μm) −0.300 −3.124 −6.125 −9.253 −9.527 −10.836 −11.259 −12.452
下载: 导出CSV
-
[1] 陈昌博. 多波长金宝搏188软件怎么用 合束系统中光束监测装置的设计[D]. 长春: 中国科学院大学(中国科学院长春光学精密机械与物理研究所), 2020.CHEN CH B. Design of beam monitoring device in multi-wavelength laser beam combining system[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2020. (in Chinese) [2] 王立军, 彭航宇, 张俊. 大功率半导体金宝搏188软件怎么用 合束进展[J]. 中国光学,2015,8(4):517-534. doi: 10.3788/co.20150804.0517WANG L J, PENG H Y, ZHANG J. Advance on high power diode laser coupling[J]. Chinese Optics, 2015, 8(4): 517-534. (in Chinese) doi: 10.3788/co.20150804.0517 [3] 陆鸿宇. 基于半导体金宝搏188软件怎么用 器的金宝搏188软件怎么用 功率合成技术[D]. 杭州: 杭州电子科技大学, 2018.LU H Y. The research on laser power synthesis technology based on semiconductor laser[D]. Hangzhou: Hangzhou Dianzi University, 2018. (in Chinese) [4] 曹宇轩, 舒世立, 孙方圆, 等. 中红外半导体金宝搏188软件怎么用 器合束技术研究进展(特邀)[J]. 红外与金宝搏188软件怎么用 工程,2018,47(10):1003002. doi: 10.3788/IRLA201847.1003002CAO Y X, SHU SH L, SUN F Y, et al. Development of beam combining technology in mid-infrared semiconductor lasers( invited)[J]. Infrared and Laser Engineering, 2018, 47(10): 1003002. (in Chinese) doi: 10.3788/IRLA201847.1003002 [5] 王立军, 彭航宇, 张俊, 等. 高功率高亮度半导体金宝搏188软件怎么用 器合束进展[J]. 红外与金宝搏188软件怎么用 工程,2017,46(4):8-17.WANG L J, PENG H Y, ZHANG J, et al. Development of beam combining of high power high brightness diode lasers[J]. Infrared and Laser Engineering, 2017, 46(4): 8-17. (in Chinese) [6] 张俊, 彭航宇, 刘云, 等. 三波长合束高亮度半导体金宝搏188软件怎么用 光源[J]. 中国金宝搏188软件怎么用 ,2013,40(4):65-70.ZHANG J, PENG H Y, LIU Y, et al. High brightness diode laser source based on three-wavelength multiplexing[J]. Chinese Journal of Lasers, 2013, 40(4): 65-70. (in Chinese) [7] 朱凡, 李颖先, 谭久彬. 高精度金宝搏188软件怎么用 光束准直系统设计[J]. 光学 精密工程,2020,28(4):817-826.ZHU F, LI Y X, TAN J B. Design of high-accuracy laser beam collimation system[J]. Optics and Precision Engineering, 2020, 28(4): 817-826. (in Chinese) [8] 杨滨赫, 蔡引娣, 文志祥, 等. 长距离金宝搏188软件怎么用 测量中光束漂移的自动补偿[J]. 光学 精密工程,2020,28(11):2393-2402. doi: 10.37188/OPE.20202811.2393YANG B H, CAI Y D, WEN ZH X, et al. Automatic compensation method for beam drift in long-distance laser measurement[J]. Optics and Precision Engineering, 2020, 28(11): 2393-2402. (in Chinese) doi: 10.37188/OPE.20202811.2393 [9] 姜振华, 王挺峰, 郭劲. “LPP-EUV”光源中的高功率CO2金宝搏188软件怎么用 监测与控制系统[J]. 中国光学,2013,6(4):544-550.JIANG ZH H, WANG T F, GUO J. Monitoring and controlling system for high power CO2 laser in “LPP-EUV” light source[J]. Chinese Optics, 2013, 6(4): 544-550. (in Chinese) [10] 张飞, 徐新行, 陈昌博. 小体积长焦距金宝搏188软件怎么用 指向监测装置研制[J]. 光学 精密工程,2021,29(6):1251-1259. doi: 10.37188/OPE.20212906.1251ZHANG F, XU X H, CHEN CH B. Development of monitoring device for laser direction with small volume and long focus[J]. Optics and Precision Engineering, 2021, 29(6): 1251-1259. (in Chinese) doi: 10.37188/OPE.20212906.1251 [11] 刘力双, 夏润秋, 吕勇, 等. 音圈电机快速控制反射镜研究现状[J]. 金宝搏188软件怎么用 杂志,2020,41(9):1-7.LIU L SH, XIA R Q, LV Y, et al. Research situation of fast steering mirror driven by voice coil motor[J]. Laser Journal, 2020, 41(9): 1-7. (in Chinese) [12] DONG Q R, LIU Y K, ZHANG Y L, et al. Improved ADRC with ILC control of a CCD-based tracking loop for fast steering mirror system[J]. IEEE Photonics Journal, 2018, 10(4): 6601314. [13] 吕世良, 刘金国, 周怀得, 等. 星载红外探测器快速反射镜控制系统设计[J]. 红外与金宝搏188软件怎么用 工程,2017,46(9):0904005. doi: 10.3788/IRLA201746.0904005LV SH L, LIU J G, ZHOU H D, et al. Design of control system for fast steering mirror of infrared detector based on satellite[J]. Infrared and Laser Engineering, 2017, 46(9): 0904005. (in Chinese) doi: 10.3788/IRLA201746.0904005 [14] 彭树萍, 陈涛, 刘廷霞, 等. 金宝搏188软件怎么用 发射系统快速反射镜的光线反射过程[J]. 光学 精密工程,2015,23(2):378-386. doi: 10.3788/OPE.20152302.0378PENG SH P, CHEN T, LIU T X, et al. Reflection process of fast-steering mirror of laser launching system[J]. Optics and Precision Engineering, 2015, 23(2): 378-386. (in Chinese) doi: 10.3788/OPE.20152302.0378 [15] 贾国伟, 侯良科, 洪普. 反射式二维快速控制反射镜的像旋模型研究[J]. 光学与光电技术,2021,19(4):86-92.JIA G W, HOU L K, HONG P. Research on model of image rotation of reflective two-dimensional fast-steering mirror[J]. Optics & Optoelectronic Technology, 2021, 19(4): 86-92. (in Chinese) [16] 李高生, 徐新行, 安振杰, 等. 可见光多波段金宝搏188软件怎么用 合束系统设计[J]. 金宝搏188软件怎么用 与红外,2023,53(2):282-288. doi: 10.3969/j.issn.1001-5078.2023.03.017LI G SH, XU X H, AN ZH J, et al. Design of visible multi-band laser beam combining system[J]. Laser & Infrared, 2023, 53(2): 282-288. (in Chinese) doi: 10.3969/j.issn.1001-5078.2023.03.017 [17] 徐新行, 李莹. 可见光电视用高精度小体积调焦平台的设计[J]. 光学 精密工程,2017,25(6):1526-1533. doi: 10.3788/OPE.20172506.1526XU X H, LI Y. Design of focusing mechanism with high precision and small volume for visible light television system[J]. Optics and Precision Engineering, 2017, 25(6): 1526-1533. (in Chinese) doi: 10.3788/OPE.20172506.1526 [18] 夏蕾, 韩旭东, 邵俊峰. 金宝搏188软件怎么用 波长合束精度研究[J]. 中国光学,2014,7(5):801-807.XIA L, HAN X D, SHAO J F. Laser beam combination accuracy of wavelength multiplexing[J]. Chinese Optics, 2014, 7(5): 801-807. (in Chinese) -


 下载:
下载:
















计量
- 文章访问数: 378
- HTML全文浏览量: 128
- PDF下载量: 181
- 被引次数: 0
