


Omnidirectional spatial monocular vision indoor localization measurement based on a two-degree-of-freedom rotary platform
-
摘要:
针对传统单目视觉测量系统测量视场有限的问题,本文提出一种基于双自由度旋转平台的全向空间单目视觉测量方法。首先,对双自由度旋转平台的转轴参数进行标定,用副相机拍摄固定在双自由度转台上的棋盘格标定板,提取棋盘格角点的位置坐标,并将其转化到同一相机坐标系下。利用PCA(主成分分析)平面拟合得到初始位置转轴参数中的方向向量,使用空间最小二乘圆拟合方法得到初始位置下转轴参数中的位置参数。然后,通过转台转动的角度以及罗德里格斯公式将不同位置下相机获取的数据进行坐标系统一,实现水平和竖直方向全向空间下的目标测量。最后,通过高精度金宝搏188软件怎么用 测距仪验证了本方法的测量精度,并通过与双目视觉测量系统、wMPS测量系统进行比对实验,验证了本方法的全向空间测量能力。实验结果表明,本方法测量精度基本达到双目视觉测量系统水平,但测量范围远大于双目视觉测量,可以满足全向空间测量要求。
Abstract:To address the problem of limited field of view measurement in traditional monocular vision measurement systems, we propose an omnidirectional spatial monocular vision measurement method based on a two-degree-of-freedom rotary platform. First, the rotating axis parameters of the double-degree-of-freedom rotary platform are calibrated. Then, the pictures of the checkerboard calibration plate fixed with the two-degree-of-freedom rotary platform are captured by using an auxiliary camera. Position coordinates of the checkerboard corner points are extracted and converted to the same camera coordinate system. The direction vector of the rotating axis parameters in the initial position is obtained through PCA (principal component analysis) plane fitting, and the position parameter of the rotating axis parameters in the initial position is determined using the method of spatial least squares circle fitting. The camera data acquired at various angles is transformed into the same coordinate system using the rotation angle of the rotary platform and the Rodrigues formula. This enables measurement of the target in the horizontal and vertical omnidirectional space. Finally, the measurement accuracy of the proposed method is verified using a high-precision laser rangefinder. Additionally, experiments comparing the omnidirectional spatial measurement ability of the proposed method with the binocular vision measurement system and wMPS measurement system are conducted. The results indicate that the method achieves a measurement accuracy comparable to that of a binocular vision system. However, it also surpasses the binocular vision system in term of measurement range, making it applicable for omnidirectional spatial measurements.
-
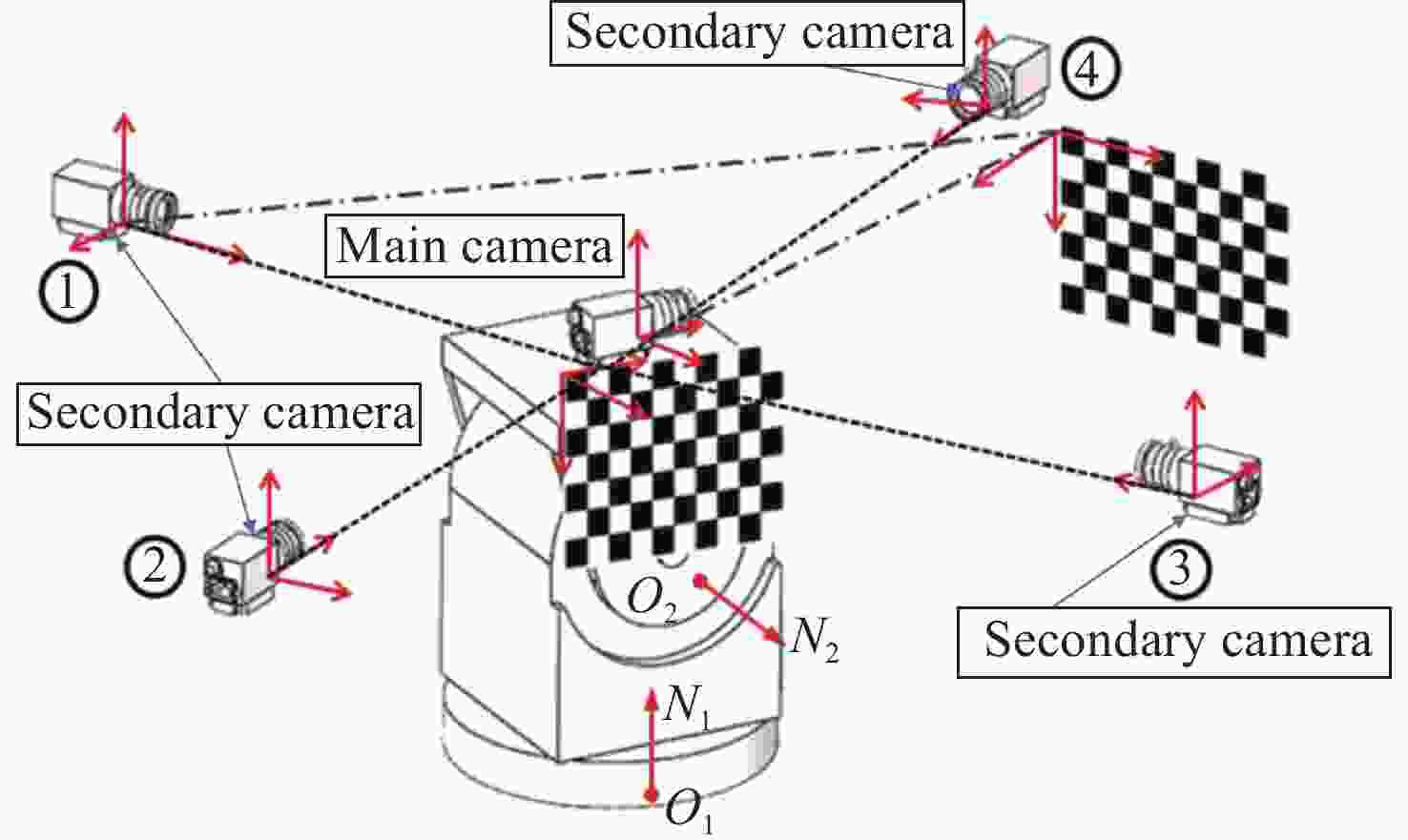
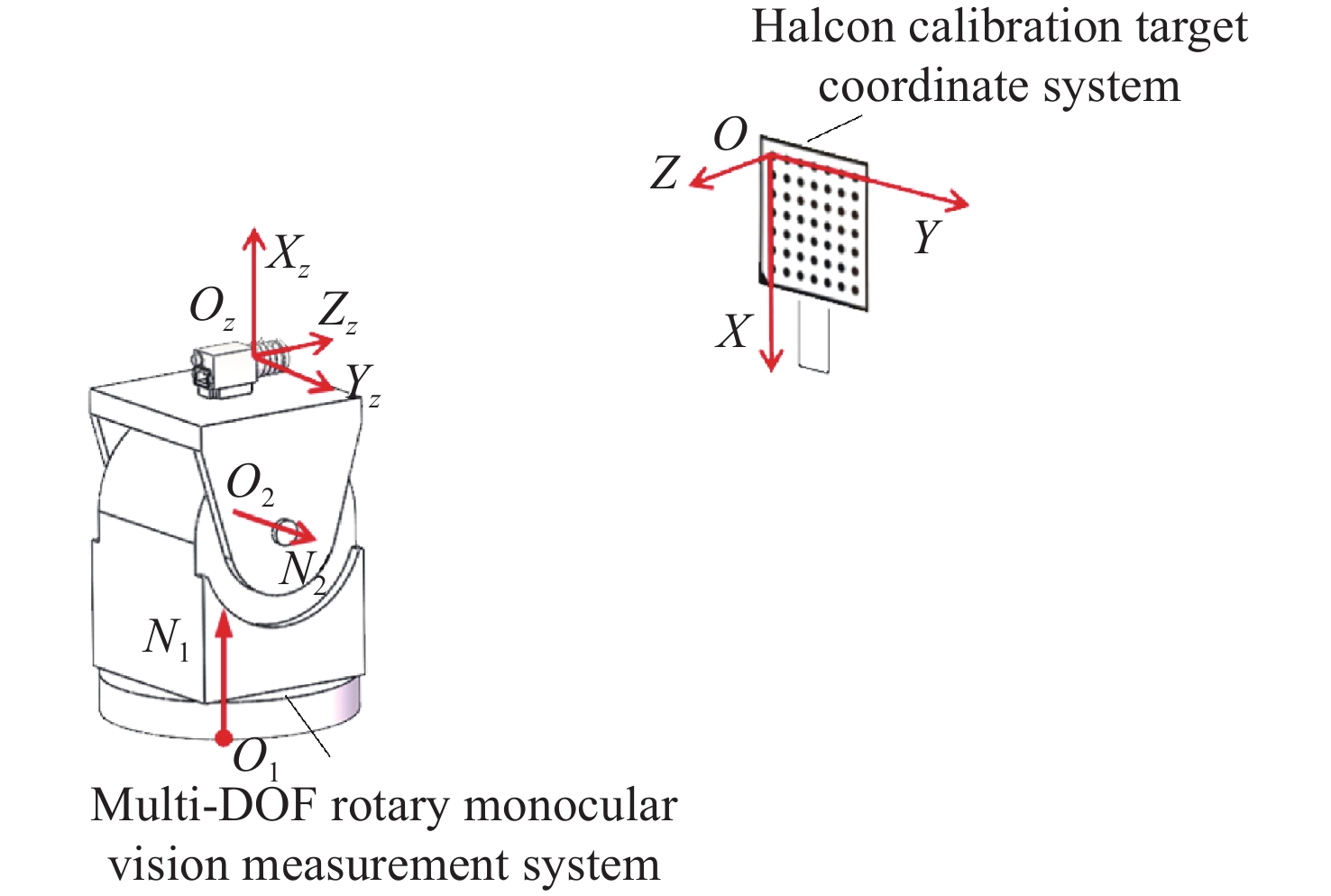
图 4 转轴参数标定原理图
Figure 4. Schematic diagram for the calibration of the rotating axis parameters
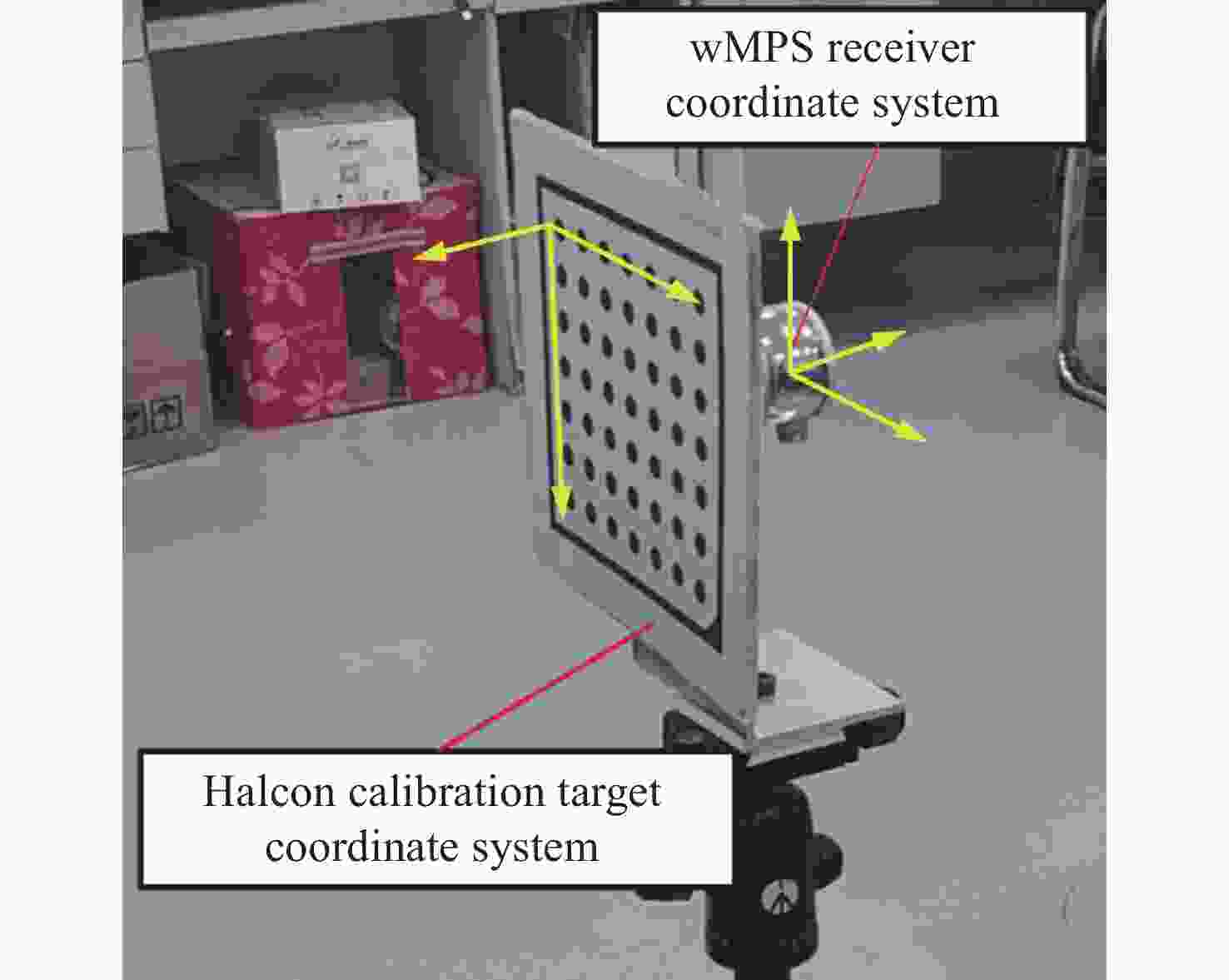
图 6 wMPS与圆形标定板连接装置
Figure 6. The connection device between wMPS and circular calibration plate
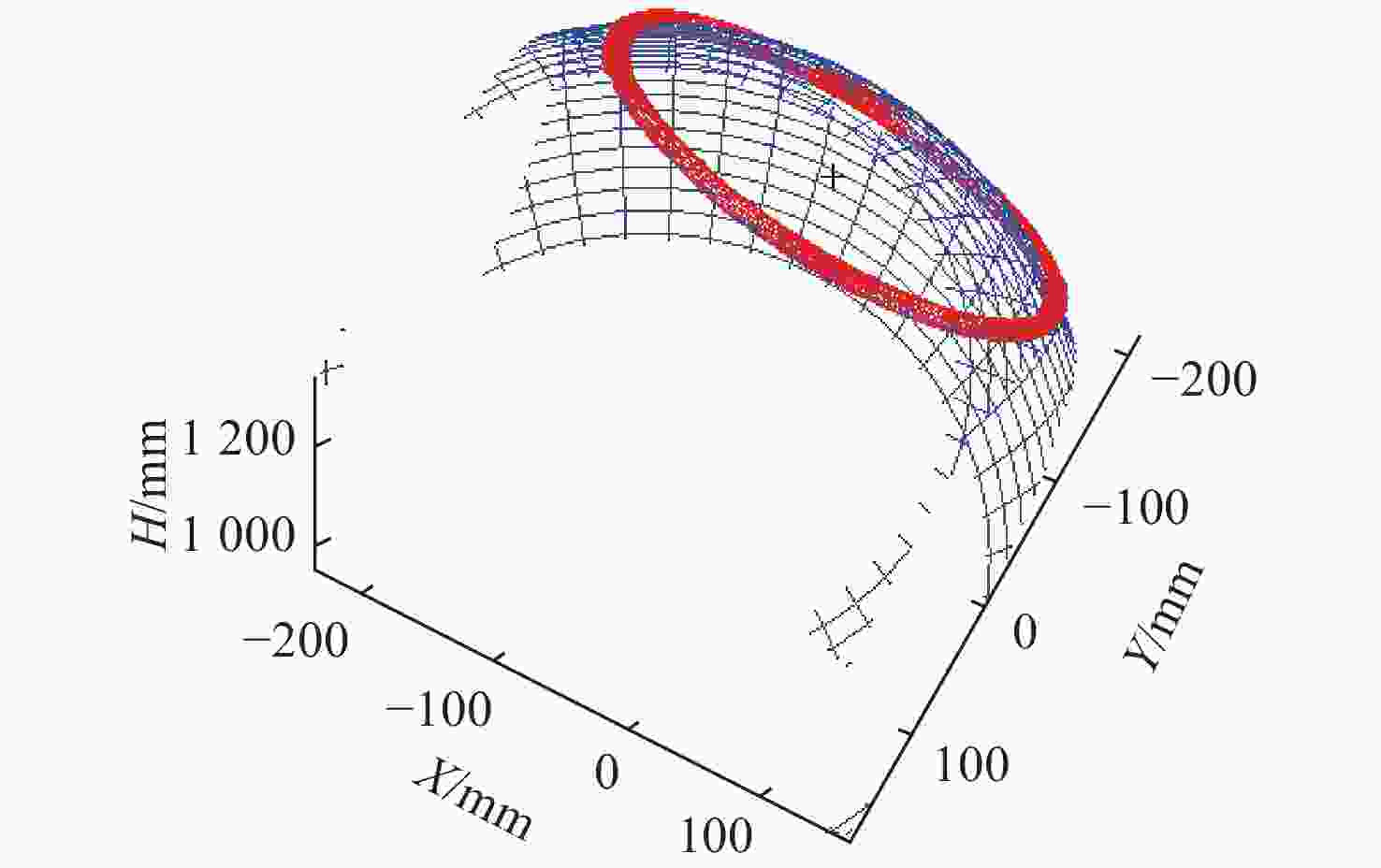
图 8 角点位姿转换坐标系后拟合结果
Figure 8. Fitting result after transforming the corner point pose data to a coordinate system
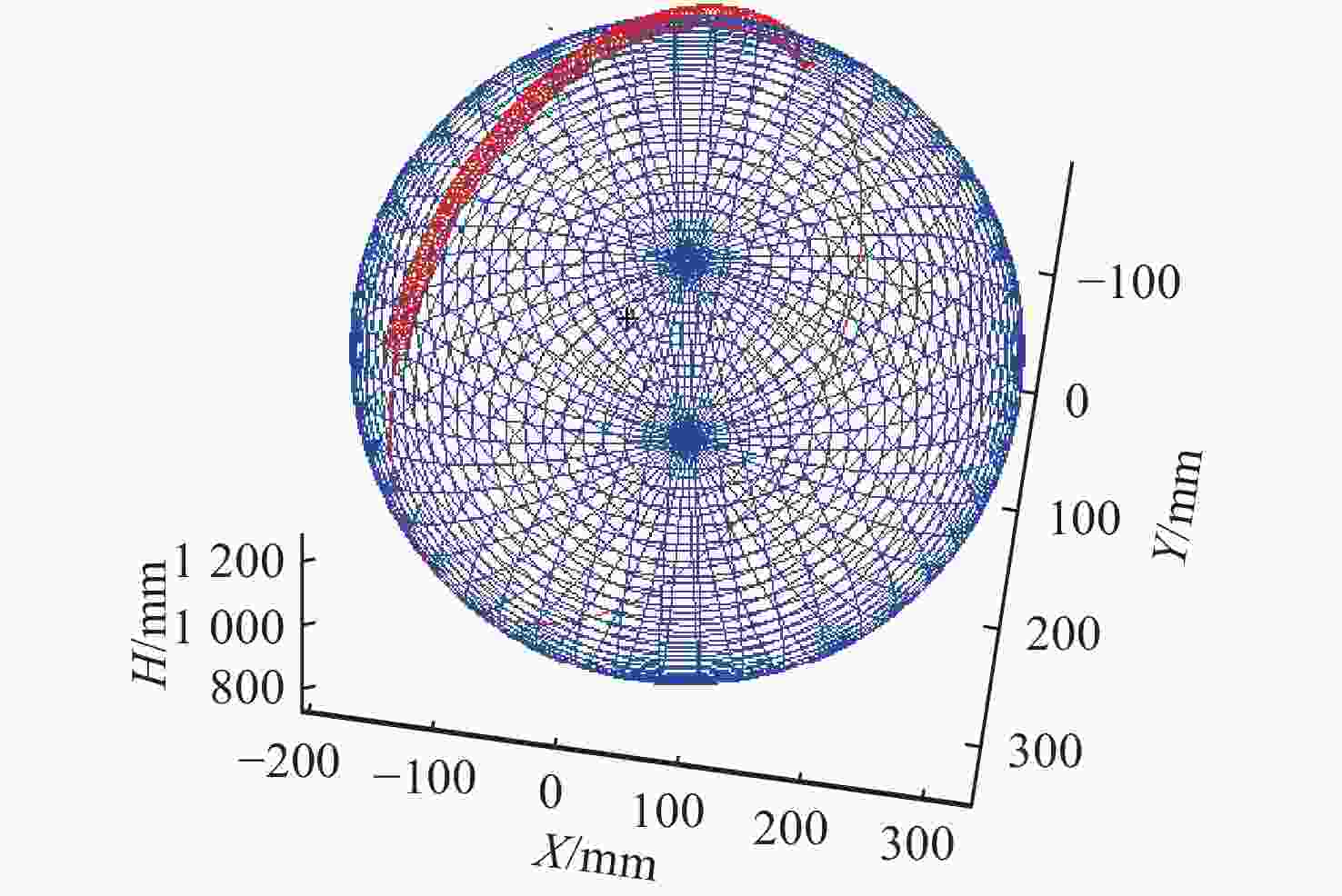
图 9 在初始位置竖直方向圆拟合结果
Figure 9. Circle fitting result in the vertical direction at the initial position
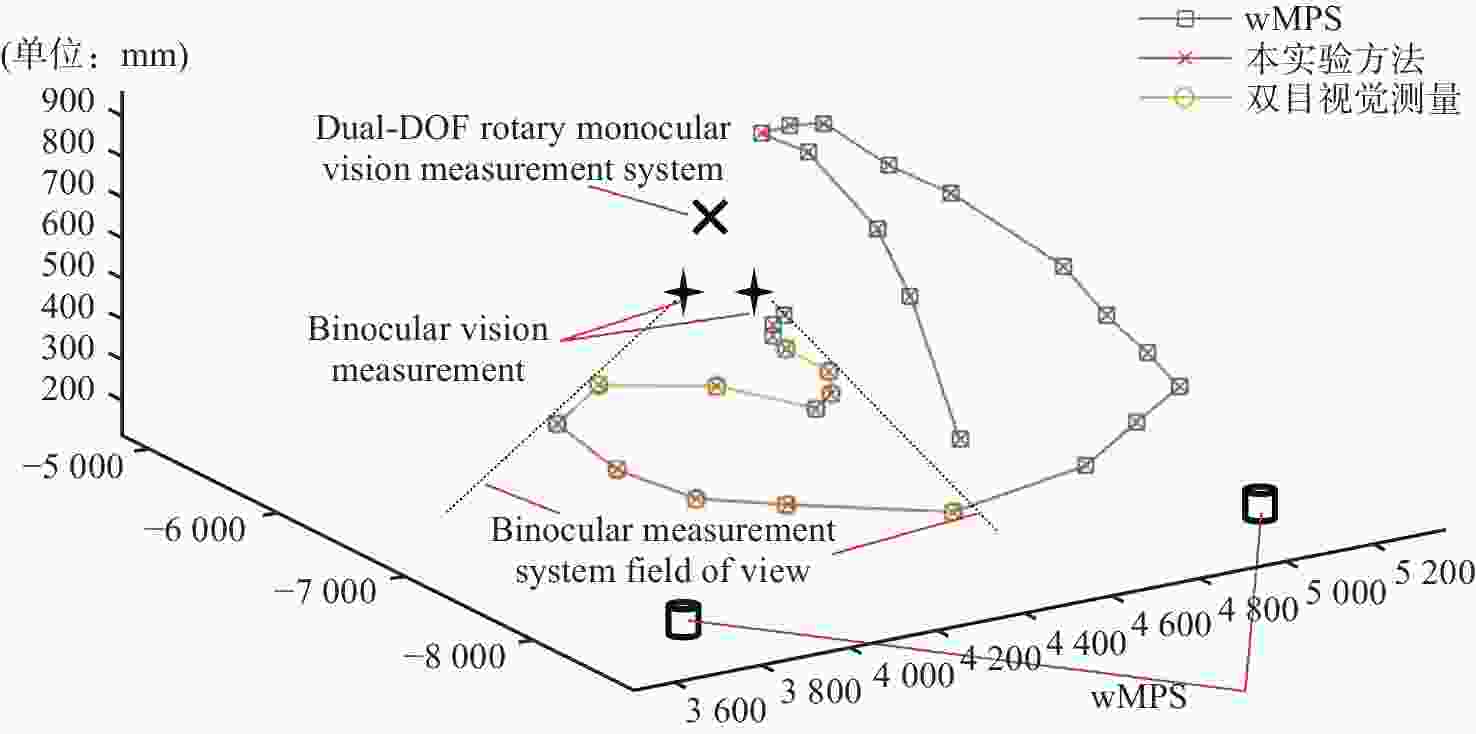
图 11 wMPS、双目与本实验方法目标点路径对比
Figure 11. Comparison of target point paths for wMPS, binocular and this experimental method
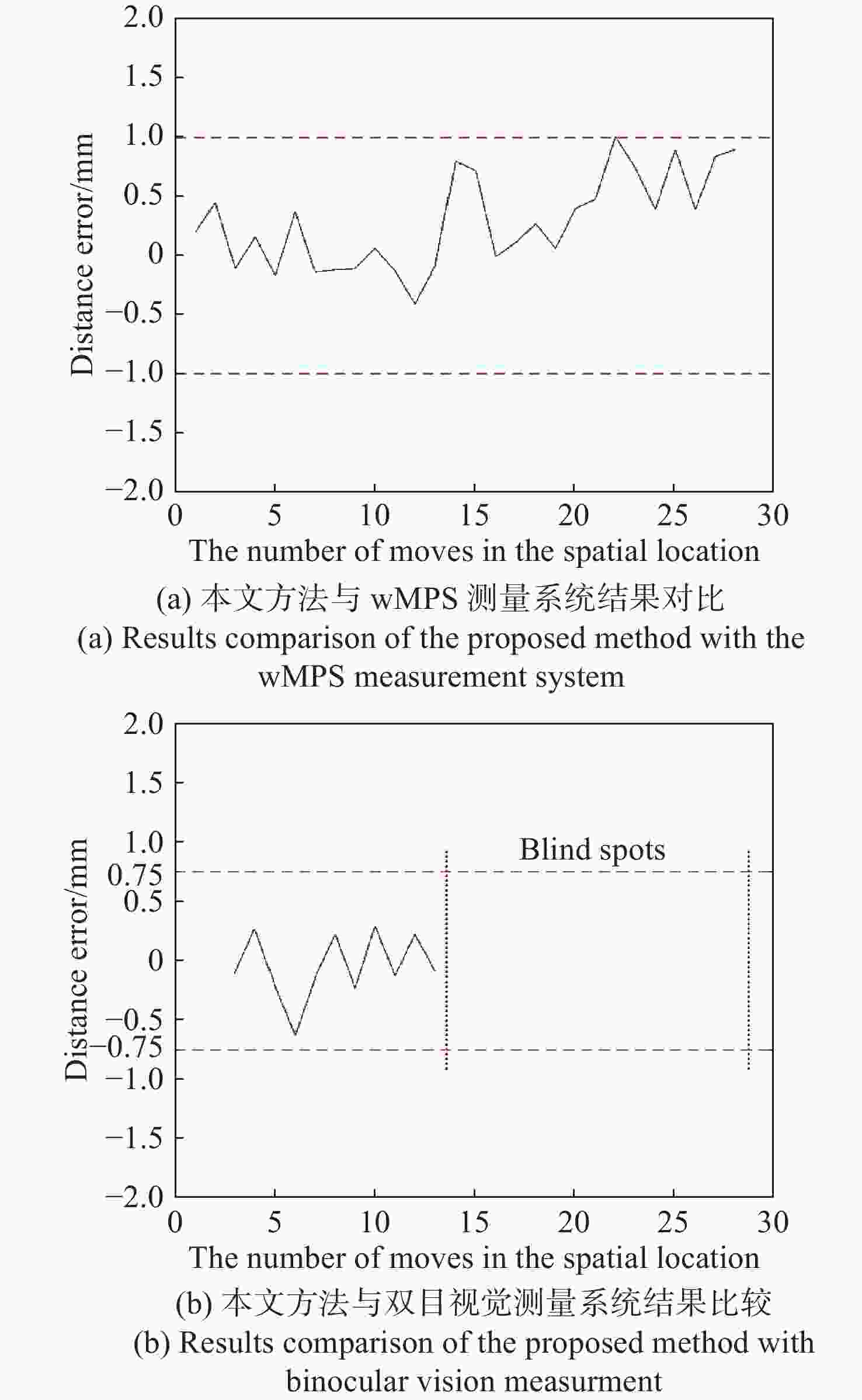
图 12 各个相邻位置的目标点之间的距离误差结果
Figure 12. Distance error results between target points at each neighboring location
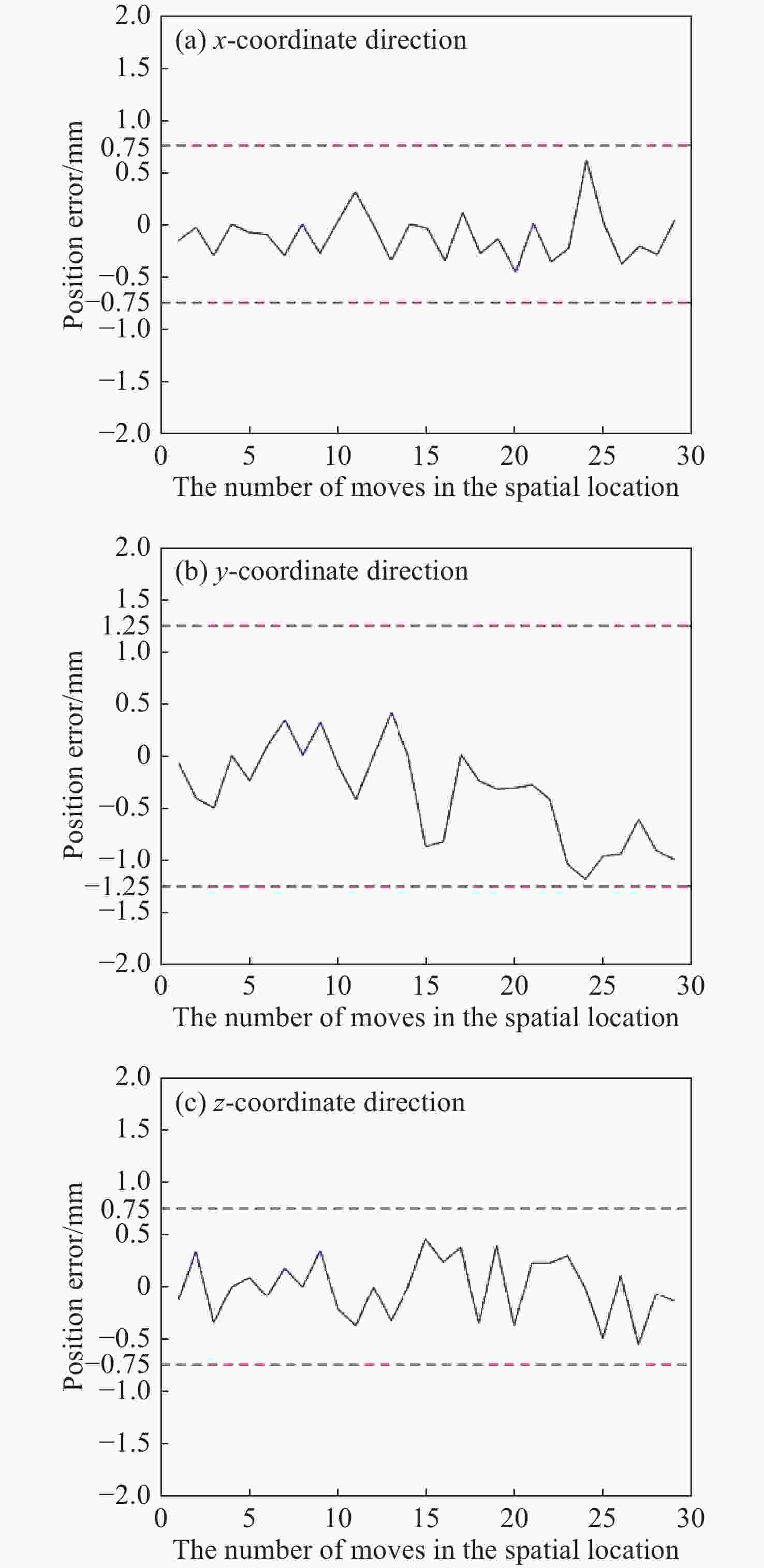
图 13 本文测量方法与wMPS测量系统各个目标点位置误差结果
Figure 13. Comparison of the measurement method proposed in this paper with the wMPS measurement system for the position error results of each location target point
表 1 拟合转台参数
Table 1. Fitting of rotary platform parameters
Rotor parameters Experimental results/mm Error/mm Direction of vector (−0.0161, 0.9998,−0.0110) 0.24 Rotor position (−45.0081, −121.0576, −24.8642) 0.54 Direction of vector (−0.0347, −0.0171, −0.9993) 0.21 Rotor position (−20.4812, 111.8834, 75.6437) 0.43  下载: 导出CSV
下载: 导出CSV
表 2 测量结果对比
Table 2. Comparison of measurement results
Location Laser ranging/mm The ranging method in this paper/mm Error/mm 1 78.50 78.81 0.31 2 166.80 167.25 0.45 3 273.40 273.76 0.36 4 403.70 403.98 0.28 5 1424.50 1424.13 0.37 6 1501.80 1501.32 0.48 7 1612.30 1611.91 0.39 8 1740.60 1740.25 0.35 9 1871.40 1871.11 0.29
下载: 导出CSV
表 3 wMPS测量系统详细参数
Table 3. Detailed parameters of the wMPS measurement system
Content Parameter Working distance 5~25 m System measurement accuracy 10 m working area 0.25 mm 39 m working area 0.50 mm Frequency 30 Hz
下载: 导出CSV
-
[1] 张宁, 付炜平, 孟荣, 等. 室内空间定位方法研究综述[J]. 科学技术与工程,2022,22(3):882-892.ZHANG N, FU W P, MENG R, et al. Review on the indoor space positioning methods[J]. Science Technology and Engineering, 2022, 22(3): 882-892. (in Chinese). [2] 孙大洋, 章荣炜, 李赞. 室内定位技术综述[J]. 无人系统技术,2020,3(3):32-46. doi: 10.19942/j.issn.2096-5915.2020.03.005SUN D Y, ZHANG R W, LI Z. Survey of indoor localization[J]. Unmanned Systems Technology, 2020, 3(3): 32-46. (in Chinese). doi: 10.19942/j.issn.2096-5915.2020.03.005 [3] 马培兴, 王玫, 周陬, 等. 基于行人航迹推算的蓝牙峰值检测方法[J]. 计算机应用研究,2022,39(3):851-856. doi: 10.19734/j.issn.1001-3695.2021.09.0366MA P X, WANG M, ZHOU Z, et al. Bluetooth peak detection method based on PDR[J]. Application Research of Computers, 2022, 39(3): 851-856. (in Chinese). doi: 10.19734/j.issn.1001-3695.2021.09.0366 [4] NEMRA A, AOUF N. Robust INS/GPS sensor fusion for UAV localization using SDRE nonlinear filtering[J]. IEEE Sensors Journal, 2010, 10(4): 789-798. doi: 10.1109/JSEN.2009.2034730 [5] ZAFARI F, GKELIAS A, LEUNG K K. A survey of indoor localization systems and technologies[J]. IEEE Communications Surveys & Tutorials, 2019, 21(3): 2568-2599. [6] WU Y Q, JIA ZH ZH, DAI Y P, et al. Research on WiFi location fingerprint positioning algorithm based on DPC-FCM clustering[J]. Wireless Communications and Mobile Computing, 2022, 2022: 8347084. [7] 黄正宇, 陈益强, 刘军发, 等. 基于众包数据的室内定位方法和平台[J]. 地球信息科学学报,2016,18(11):1476-1484.HUANG ZH Y, CHEN Y Q, LIU J F, et al. Indoor localization method and platform based on crowdsourcing data[J]. Journal of Geo-Information Science, 2016, 18(11): 1476-1484. (in Chinese). [8] SHU Y CH, HUANG Y H, ZHANG J Q, et al. Gradient-based fingerprinting for indoor localization and tracking[J]. IEEE Transactions on Industrial Electronics, 2016, 63(4): 2424-2433. doi: 10.1109/TIE.2015.2509917 [9] 江德祥, 胡明清, 陈益强, 等. 基于核岭回归的自适应蓝牙定位方法[J]. 计算机应用研究,2010,27(9):3487-3489, 3492. doi: 10.3969/j.issn.1001-3695.2010.09.077JIANG D X, HU M Q, CHEN Y Q, et al. Adaptive Bluetooth location method based on kernel ridge regression[J]. Application Research of Computers, 2010, 27(9): 3487-3489, 3492. (in Chinese). doi: 10.3969/j.issn.1001-3695.2010.09.077 [10] 崔哲, 杜进展, 刘飞, 等. UWB室内定位技术现状与应用展望[J]. 现代测绘,2022,45(2):10-15. doi: 10.3969/j.issn.1672-4097.2022.02.003CUI ZH, DU J ZH, LIU F, et al. Current situation and application prospect of UWB indoor positioning technology[J]. Modern Surveying and Mapping, 2022, 45(2): 10-15. (in Chinese). doi: 10.3969/j.issn.1672-4097.2022.02.003 [11] ZHANG D F, ROLT S, MAROPOULOS P G. Modelling and optimization of novel laser multilateration schemes for high-precision applications[J]. Measurement Science and Technology, 2005, 16(12): 2541-2547. doi: 10.1088/0957-0233/16/12/020 [12] LIU ZH X, ZHU J G, YANG L H, et al. A single-station multi-tasking 3D coordinate measurement method for large-scale metrology based on rotary-laser scanning[J]. Measurement Science and Technology, 2013, 24(10): 105004. doi: 10.1088/0957-0233/24/10/105004 [13] YANG L H. Novel method for spatial angle measurement based on rotating planar laser beams[J]. Chinese Journal of Mechanical Engineering, 2010, 23(6): 758-764. doi: 10.3901/CJME.2010.06.758 [14] MANWILLER P E. A new modeling approach for a priori uncertainties of laser tracker angle measurements[J]. Journal of Surveying Engineering, 2023, 149(4): 04023009. doi: 10.1061/JSUED2.SUENG-1433 [15] GUO Y G, LI Z CH, YANG H. Construction of precise three-dimensional engineering control network with total station and laser tracker[J]. Journal of Applied Geodesy, 2023, 16(4): 321-329. [16] XIE Y, LIN J R, YANG L H, et al. A new single-station wMPS measurement method with distance measurement[J]. Proceedings of SPIE, 2015, 9677: 96771Z. [17] 李勤文, 倪首军, 王志乾, 等. 非公共视场双目相机位姿标定[J]. 光学 精密工程,2020,28(12):2737-2744. doi: 10.37188/OPE.20202812.2737LI Q W, NI SH J, WANG ZH Q, et al. Calibration of binocular camera with non-common field of view[J]. Optics and Precision Engineering, 2020, 28(12): 2737-2744. (in Chinese). doi: 10.37188/OPE.20202812.2737 [18] 吕家国, 蒋晓瑜, 张鹏炜, 等. 医疗机器人双目视觉硬件系统设计与实现[J]. 中国光学,2014,7(2):307-314.LYU J G, JIANG X Y, ZHANG P W, et al. Hardware design and implementation of binocular vision system for a medical robot[J]. Chinese Optics, 2014, 7(2): 307-314. (in Chinese). [19] 陈天择, 葛宝臻, 罗其俊. 重投影优化的自由双目相机位姿估计方法[J]. 中国光学,2021,14(6):1400-1409. doi: 10.37188/CO.2021-0105CHEN T Z, GE B ZH, LUO Q J. Pose estimation for free binocular cameras based on reprojection error optimization[J]. Chinese Optics, 2021, 14(6): 1400-1409. (in Chinese). doi: 10.37188/CO.2021-0105 [20] 王向军, 邓子贤, 曹雨, 等. 野外大视场单相机空间坐标测量系统的快速标定[J]. 光学 精密工程,2017,25(7):1961-1967.WANG X J, DENG Z X, CAO Y, et al. Fast calibration for single camera space coordinate measuring system with large field of view[J]. Optics and Precision Engineering, 2017, 25(7): 1961-1967. (in Chinese). [21] 赵显庭, 王晋疆, 王陈光. 基于转轴参数的多自由度双目视觉系统标定[J]. 光学技术,2018,44(2):140-146. doi: 10.13741/j.cnki.11-1879/o4.2018.02.003ZHAO X T, WANG J J, WANG CH G. Calibration of multiple degrees of freedom binocular stereo vision system based on axis parameters[J]. Optical Technique, 2018, 44(2): 140-146. (in Chinese). doi: 10.13741/j.cnki.11-1879/o4.2018.02.003 [22] ZHANG ZH Y. A flexible new technique for camera calibration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(11): 1330-1334. doi: 10.1109/34.888718 [23] 岳晓奎, 侯小娟. 基于Rodrigues参数的视觉相对位姿确定算法[J]. 宇航学报,2010,31(3):753-757.YUE X K, HOU X J. Vision-based relative position and attitude determination using rodrigues parameters[J]. Journal of Astronautics, 2010, 31(3): 753-757. (in Chinese). [24] 朱帆, 于芳苏, 吴易明, 等. P4P法相机姿态标定精度分析[J]. 光学学报,2018,38(11):1115005. doi: 10.3788/AOS201838.1115005ZHU F, YU F S, WU Y M, et al. Analysis of attitude calibration precision of P4P camera[J]. Acta Optica Sinica, 2018, 38(11): 1115005. (in Chinese). doi: 10.3788/AOS201838.1115005 [25] 周江华, 苗育红, 王明海. 姿态运动的Rodrigues参数描述[J]. 宇航学报,2004,25(5):514-519. doi: 10.3321/j.issn:1000-1328.2004.05.008ZHOU J H, MIAO Y H, WANG M H. Attitude representation using rodrigues parameter[J]. Journal of Astronautics, 2004, 25(5): 514-519. (in Chinese). doi: 10.3321/j.issn:1000-1328.2004.05.008 [26] 冯萍, 魏振忠. 光笔式大视场三维视觉测量系统[J]. 光学 精密工程,2013,21(9):2217-2224. doi: 10.3788/OPE.20132109.2217FENG P, WEI ZH ZH. Light probe based large FOV 3D vision measurement system[J]. Optics and Precision Engineering, 2013, 21(9): 2217-2224. (in Chinese). doi: 10.3788/OPE.20132109.2217 [27] 王谭, 王磊磊, 张卫国, 等. 基于张正友标定法的红外靶标系统[J]. 光学 精密工程,2019,27(8):1828-1835. doi: 10.3788/OPE.20192708.1828WANG T, WANG L L, ZHANG W G, et al. Design of infrared target system with Zhang Zhengyou calibration method[J]. Optics and Precision Engineering, 2019, 27(8): 1828-1835. (in Chinese). doi: 10.3788/OPE.20192708.1828 [28] 浮丹丹, 周绍光, 徐洋, 等. 基于主成分分析的点云平面拟合技术研究[J]. 测绘工程,2014,23(4):20-23. doi: 10.19349/j.cnki.issn1006-7949.2014.04.005FU D D, ZHOU SH G, XU Y, et al. Point cloud plane fitting technology based on principal component analysis[J]. Engineering of Surveying and Mapping, 2014, 23(4): 20-23. (in Chinese). doi: 10.19349/j.cnki.issn1006-7949.2014.04.005 [29] WANG G, WANG F F, XIONG F, et al. Pulse signal preprocessing based on wavelet transform-principal component analysis[C]. The 15th Textile Bioengineering and Informatics Symposium, Bioengineering and Informatics Society, 2022: 34-39. [30] HE CH M, LI X R, HU Y Y, et al. Microscope images automatic focus algorithm based on eight-neighborhood operator and least square planar fitting[J]. Optik, 2020, 206: 164232. doi: 10.1016/j.ijleo.2020.164232 [31] 秦锋, 鹿松, 张振虎. 基于BFGS算法的空间圆拟合方法[J]. 城市勘测,2022(6):164-167.QIN F, LU S, ZHANG ZH H. Space circle fitting method based on BFGS algorithm[J]. Urban Geotechnical Investigation & Surveying, 2022(6): 164-167. (in Chinese). [32] NI Y B, WANG X J, YIN L. Relative pose estimation for multiple cameras using Lie algebra optimization[J]. Applied Optics, 2019, 58(11): 2963-2972. doi: 10.1364/AO.58.002963 -


 下载:
下载:













计量
- 文章访问数: 273
- HTML全文浏览量: 180
- PDF下载量: 69
- 被引次数: 0
