


Realization and error analysis of geographical guidance for roll-pitch electro-optical pod
-
摘要:
为了提升地理导引精度和成功率,根据滚仰式光电吊舱的结构特点,通过建立坐标系统、目标坐标求解和框架角解算三个步骤,完整构建了地理导引的数学模型,并在此基础上引入了速度前馈和小区域搜索模式。同时,对受惯导测量误差和目标距离影响的框架角解算误差进行了数据仿真。结果表明:经纬误差和航向角误差对俯仰角的解算误差影响较大;而高程误差和水平姿态角误差则对横滚角的解算误差影响较大。提升惯导的定位精度,可进一步减小框架角解算误差,从而提升地理导引精度,而当航向角<0.1°,水平姿态角<0.05°时,姿态角误差的影响权重会变小,再通过减小姿态角误差提升导引精度的作用已不明显。随着目标距离的增大,框架角解算误差会急剧减小。最后进行了导引试验,其俯仰、横滚角均方差均小于0.12°,表明了算法的准确性和仿真分析的有效性。
Abstract:In order to improve the accuracy and success rate of geographical guidance, according to the structural characteristics of the roll-pitch electro-optical pod, a mathematical model of geographical guidance was developed through three steps: first, establishing the coordinate system; second, solving the target coordinates; and third, calculating the frame angle. Speed forward feed and small domain search modes were introduced on this basis. The frame angle calculation error affected by inertial navigation measurement error and target distance was simulated, and the results show that the longitude, latitude, and heading angle errors had a greater influence on the pitch angle calculation error; nonetheless, the errors of elevation and horizontal attitude angle had a greater influence on the calculation error of the roll angle. Improving the positioning accuracy of inertial navigation can further reduce the frame angle calculation error and improve the geographical guidance accuracy. However, when the heading angle decreases below 0.1 degrees and the horizontal attitude angle decreases below 0.05 degrees, then the influence weight of the attitude angle error also decreases. The improvement in guidance accuracy is no longer evident when attitude angle errors are reduced. Increasing target distance sharply decreases the error of frame angle calculation. Finally, the guidance test with pitch and roll mean square errors of less than 0.12 degrees shows the algorithm's accuracy and the simulation analysis's effectiveness.
-
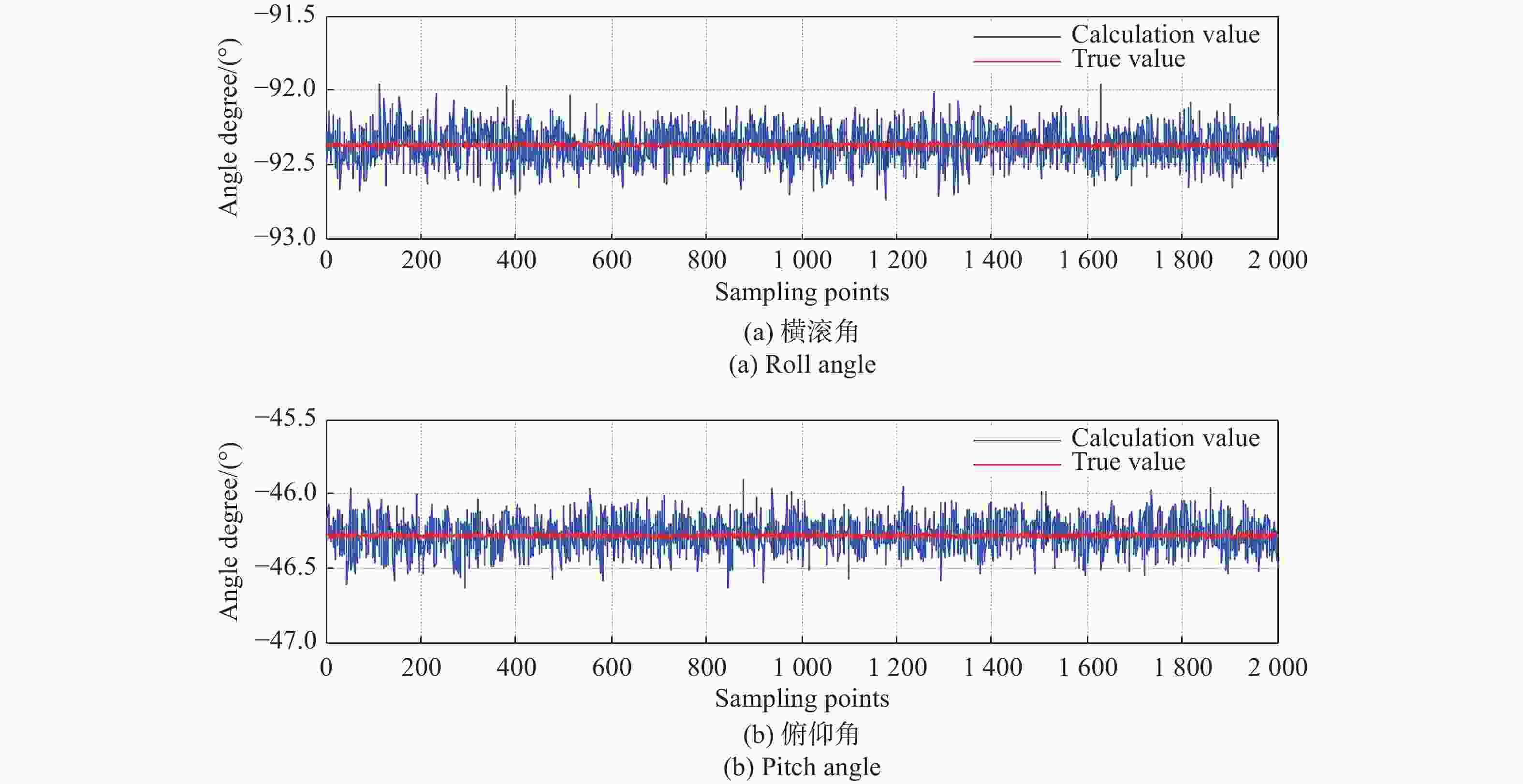
图 5框架角解算与真值对比
Figure 5.Comparison between calculated value of frame angle and true value
表 1不同圆误差概率与均方差换算关系
Table 1.Conversion relation between different CEPs and mean square error
圆概率误差 CEP50 CEP90 CEP95 CEP99 均方差 1.1774$ \sigma $ 2.1459$ \sigma $ 2.4477$ \sigma $ 3.4393$ \sigma $  下载:
导出CSV
下载:
导出CSV
表 2惯导精度指标
Table 2.Inertial navigation system accuracy index
科目 水平位置 高程 航向角 水平姿态角 精度指标 3 m(50%CEP) 5 m(1σ) 0.04°(1σ) 0.01°(1σ) 下载:
导出CSV
表 3导引试验数据
Table 3.Guidance test data
(°) 航向角 1#目标 2#目标 横滚均方差 俯仰均方差 横滚均方差 俯仰均方差 −84.5 0.115 0.106 0.110 0.106 −169.9 0.117 0.110 0.116 0.108 −7.4 0.113 0.104 0.115 0.107 下载:
导出CSV
-
[1] 万华翔, 张雅舰. 蜂群无人机对战场环境的影响及对抗技术研究[J]. 飞航导弹,2019(4):68-72.WAN H X, ZHANG Y J. Research on the influence of bee colony UAV on battlefield environment and countermeasures[J].Aerodynamic Missile Journal, 2019(4): 68-72. (in Chinese) [2] 刘召庆, 张芳, 朱镭, 等. 巡飞弹目标定位精度分析[J]. 应用光学,2022,43(4):592-598.doi:10.5768/JAO202243.0401002LIU ZH Q, ZHANG F, ZHU L,et al. Target location accuracy analysis on loitering missile platform[J].Journal of Applied Optics, 2022, 43(4): 592-598. (in Chinese).doi:10.5768/JAO202243.0401002 [3] 孙辉. 机载光电平台目标定位与误差分析[J]. 中国光学,2013,6(6):912-918.SUN H. Target localization and error analysis of airborne electro-optical platform[J].Chinese Optics, 2013, 6(6): 912-918. (in Chinese). [4] 贾伟, 孙美蕊, 李大健. 无人机光电载荷地理跟踪控制研究[J]. 航空计算技术,2012,42(2):117-119.JIA W, SUN M R, LI D J. Geographical tracking algorithm of UAV EO/IR payload[J].Aeronautical Computing Technique, 2012, 42(2): 117-119. (in Chinese). [5] 王惠林, 杜佩, 庞澜, 等. 基于机载惯导系统的地理跟踪技术[J]. 应用光学,2011,32(S1):5-8.WANG H L, DU P, PANG L,et al. Geo-tracking technique based on INS[J].Journal of Applied Optics, 2011, 32(S1): 5-8. (in Chinese) [6] 陈文建, 纪明, 张建峰, 等. 地理跟踪过程中光电吊仓惯性定位技术研究[J]. 应用光学,2007,28(6):675-679.CHEN W J, JI M, ZHANG J F,et al. Electro-optical pod inertial orientation during geographic tracking[J].Journal of Applied Optics, 2007, 28(6): 675-679. (in Chinese). [7] 徐诚, 黄大庆. 无人机光电侦测平台目标定位误差分析[J]. 仪器仪表学报,2013,34(10):2265-2270.XU CH, HUANG D Q. Error analysis for target localization with unmanned aerial vehicle electro-optical detection platform[J].Chinese Journal of Scientific Instrument, 2013, 34(10): 2265-2270. (in Chinese). [8] 史辉, 郝晰辉, 杨玉淳, 等. 光电侦察系统目标定位精度评价指标研究[J]. 应用光学,2012,33(3):446-451.SHI H, HAO X H, YANG Y CH,et al. Target location accuracy evaluation index of electro-optical reconnaissance system[J].Journal of Applied Optics, 2012, 33(3): 446-451. (in Chinese). [9] 孙辉, 李志强, 张建华, 等. 机载光电平台目标交会定位[J]. 中国光学,2015,8(6):988-996.doi:10.3788/co.20150806.0988SUN H, LI ZH Q, ZHANG J H,et al. Target localization with intersection measurement for airborne electro-optical platform[J].Chinese Optics, 2015, 8(6): 988-996. (in Chinese).doi:10.3788/co.20150806.0988 [10] 王晶, 高利民, 姚俊峰. 机载测量平台中的坐标转换误差分析[J]. 光学 精密工程,2009,17(2):388-394.WANG J, GAO L M, YAO J F. Analysis on coordinate conversion error of airborne measuring device[J].Optics and Precision Engineering, 2009, 17(2): 388-394. (in Chinese). [11] 王向军, 万子敬, 王鑫, 等. 无人机地面目标实时自主视觉定位[J]. 红外与 工程,2014,43(2):615-619.WANG X J, WAN Z J, WANG X,et al. Ground targets location of UAV using vision location method[J].Infrared and Laser Engineering, 2014, 43(2): 615-619. (in Chinese). [12] 彭富伦, 王静, 吴颐雷, 等. 车载光电侦察系统目标定位及误差分析[J]. 应用光学,2014,35(4):557-562.PENG F L, WANG J, WU Y L,et al. Object positioning and error analysis of vehicular electro-optical reconnaissance system[J].Journal of Applied Optics, 2014, 35(4): 557-562. (in Chinese). [13] 王东鹤, 陈定荣, 张绍君, 等. 直升机载光电平台目标定位误差分析[J]. 红外技术,2015,37(11):926-931.WANG D H, CHEN D R, ZHANG SH J,et al. Targeting error analysis on helicopter photoelectric platform[J].Infrared Technology, 2015, 37(11): 926-931. (in Chinese). [14] 江云, 李友年, 王霞. 滚仰式捷联导引头视线角速度提取技术研究[J]. 电光与控制,2015,22(4):66-69.doi:10.3969/j.issn.1671-637X.2015.04.015JIANG Y, LI Y N, WANG X. Line-of-sight angle rate extraction for roll-pitch strap-down seeker[J].Electronics Optics & Control, 2015, 22(4): 66-69. (in Chinese).doi:10.3969/j.issn.1671-637X.2015.04.015 [15] 吴海龙, 贾宏光, 魏群, 等. 滚仰式导引头跟踪回路角增量优化[J]. 光学 精密工程,2014,22(10):2787-2795.doi:10.3788/OPE.20142210.2787WU H L, JIA H G, WEI Q,et al. Optimization of angle increments in tracking loop for roll-pitch seekers[J].Optics and Precision Engineering, 2014, 22(10): 2787-2795. (in Chinese).doi:10.3788/OPE.20142210.2787 [16] 周俊鹏. 光电干扰吊舱复合轴控制的研究[D]. 长春: 中国科学院长春光学精密机械与物理研究所, 2018.ZHOU J P.Research on optoelectric interference pod compound axis control[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2018. (in Chinese). [17] 王志伟, 祁载康, 王江. 滚-仰式导引头跟踪原理[J]. 红外与 工程,2008,37(2):274-277.WANG ZH W, QI Z K, WANG J. Tracking principle for roll-pitch seeker[J].Infrared and Laser Engineering, 2008, 37(2): 274-277. (in Chinese). [18] 孟立新, 赵丁选, 张立中, 等. 机载 通信稳瞄吊舱设计与跟踪精度测试[J]. 兵工学报,2015,36(10):1916-1923.MENG L X, ZHAO D X, ZHANG L ZH,et al. The test of tracking accuracy and design of airborne laser communication stabilized pod[J].Acta Armamentarii, 2015, 36(10): 1916-1923. (in Chinese). [19] 陈雨, 赵剡, 张同贺, 等. 滚仰式捷联导引头跟踪原理与仿真[J]. 航空兵器,2010,17(5):55-58,64.CHEN Y, ZHAO Y, ZHANG T H,et al. Tracking principle and simulation for roll-pitch strap-down seeker[J].Aero Weaponry, 2010, 17(5): 55-58,64. (in Chinese). -

 下载:
下载:











 点击查看大图
点击查看大图

计量
- 文章访问数:154
- HTML全文浏览量:84
- PDF下载量:24
- 被引次数:0
