


A target location method for aerial images through fast iteration of elevation based on DEM
-
摘要:
在大倾角航空相机对地面目标定位过程中,借助数字高程模型(DEM)可有效解决地球椭球模型定位存在的大地高误差影响。为获取地面坐标的准确信息特别是高程信息,首先,根据载机的位置姿态信息以及航空相机的框架角等信息利用齐次坐标变换求解出成像系统视轴在地理坐标系下的指向,再利用数字高程模型确定目标点的坐标。针对成像过程中目标点高程计算繁琐、容易不迭代等问题,提出了一种对目标高程值进行快速迭代的方法。通过对目标区域高程进行折半查找处理,计算该处视轴光线高程与地面高程差值。继续计算该高程差中值并继续迭代,直到小于一定阈值。最后使用蒙特卡洛分析法对整个成像过程存在的误差项进行分析。实验结果表明:采用快速迭代法进行计算,当收敛阈值为十分之一DEM网格精度时,迭代效率提升45.5%,收敛速度大大提高;且通过数字高程模型计算,在飞行高度为15409 m,相机框架角大于74°时,对于山地区域目标的圆概率误差小于200 m,可以满足实际工程需要。
Abstract:In the positioning process of aerial cameras with large inclination angles, the influence of height error in the earth ellipsoid model can be effectively solved with the help of a digital elevation model (DEM). This is very important for obtaining accurate ground coordinates, especially elevation. Firstly, the orientation of the line-of-sight angle in the geographic coordinate system is solved by transforming homogeneous coordinates according to the position and attitude information of the carrier aircraft and the frame angle information of the aerial camera, and then the longitude and latitude of the target point are determined by a digital elevation model. To overcome the tedious nature of calculating target elevation and the non-convergence in the imaging process, a fast iterative method is proposed to iterate over the target elevation’s value. The difference between the light elevation of the visual axis and the ground elevation is calculated by halving the target elevation. The median elevation difference is calculated iteratively until it is less than a certain threshold. Finally, Monte Carlo analysis was used to analyze the error terms in the whole imaging process. When the convergence threshold is 1/10 DEM in grid accuracy, the iteration efficiency increases by 45.5% and the convergence speed is greatly improved. Through the calculation of the digital elevation model, when the flight height is 15,409 meters and the camera frame’s angle is greater than 74°, a mountainous area’s target circular error probability is less than 200 m which meets the real engineering needs.
-

图 4 地球坐标系与地球椭球模型示意图
Figure 4. Schematic diagram of the ECEF coordinate frame and the Earth ellipsoid model

图 5 不同大地高标准差下成像倾角对目标定位精度的影响
Figure 5. Effects of imaging inclinations on target positioning accuracy under different ground height standard deviations
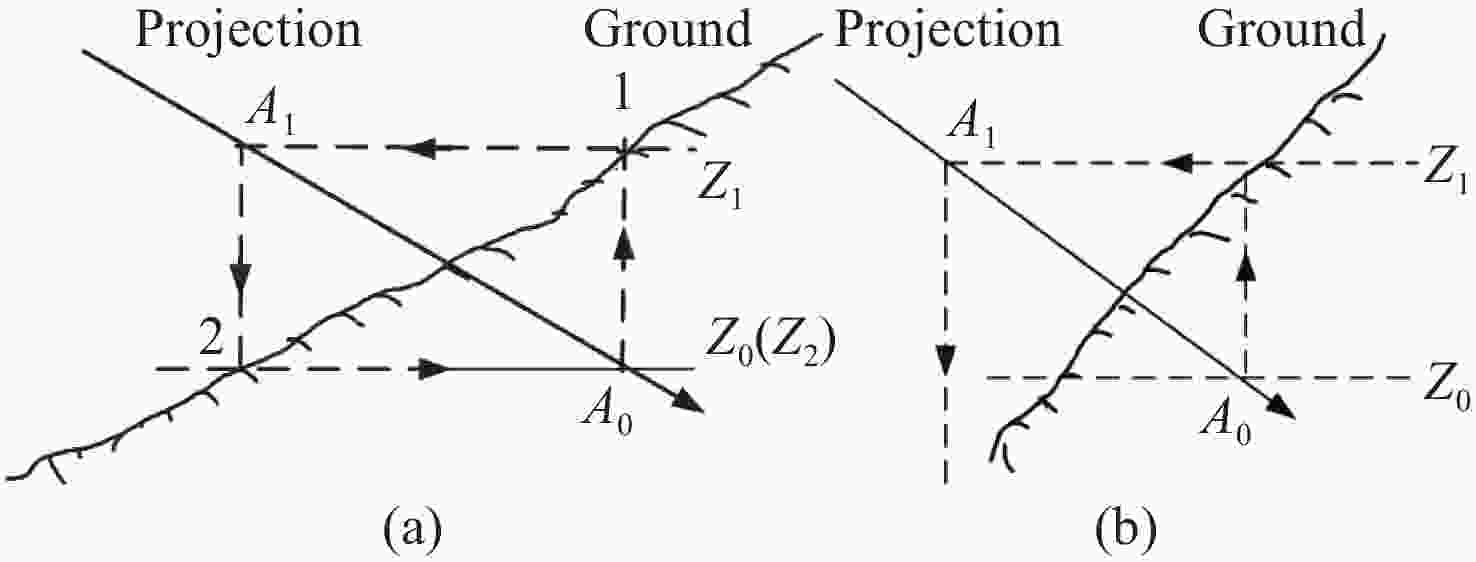
图 7 常规迭代方法不收敛的情形。(a)情形1;(b)情形2
Figure 7. Situations of the iterative non-convergence of the regular iterative method. (a) Situation 1; (b) situation 2
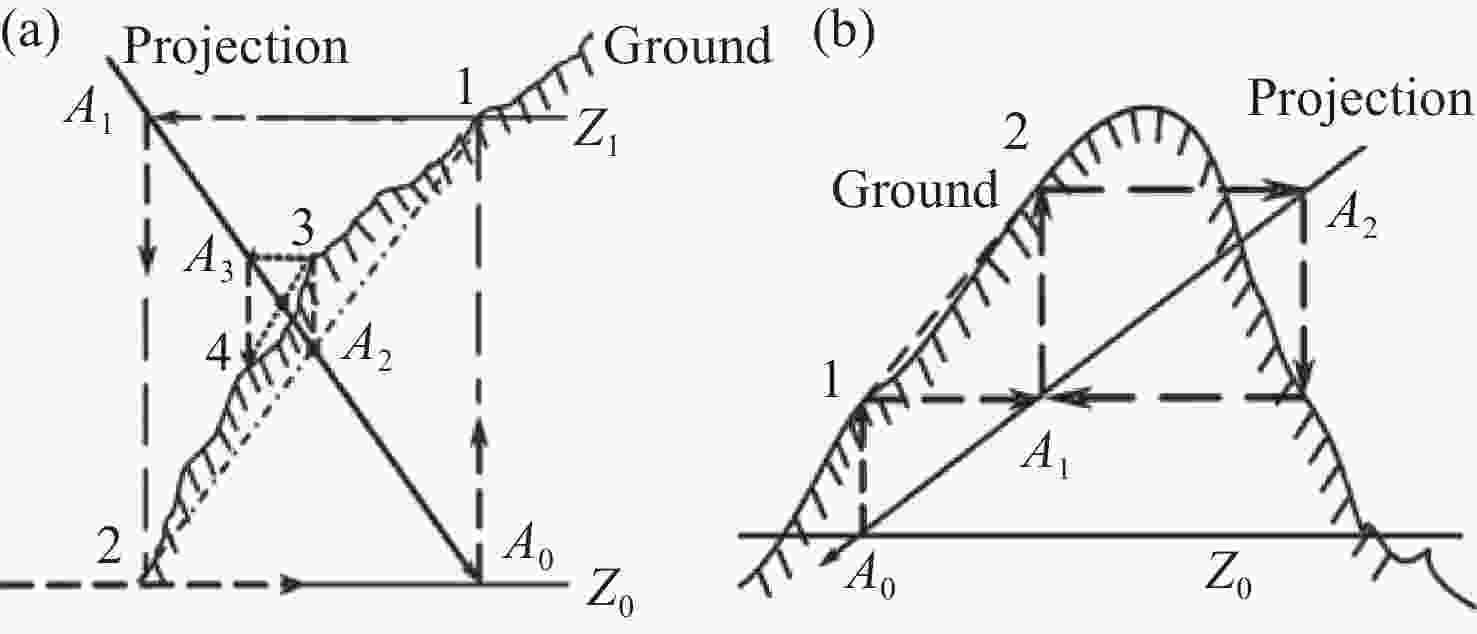
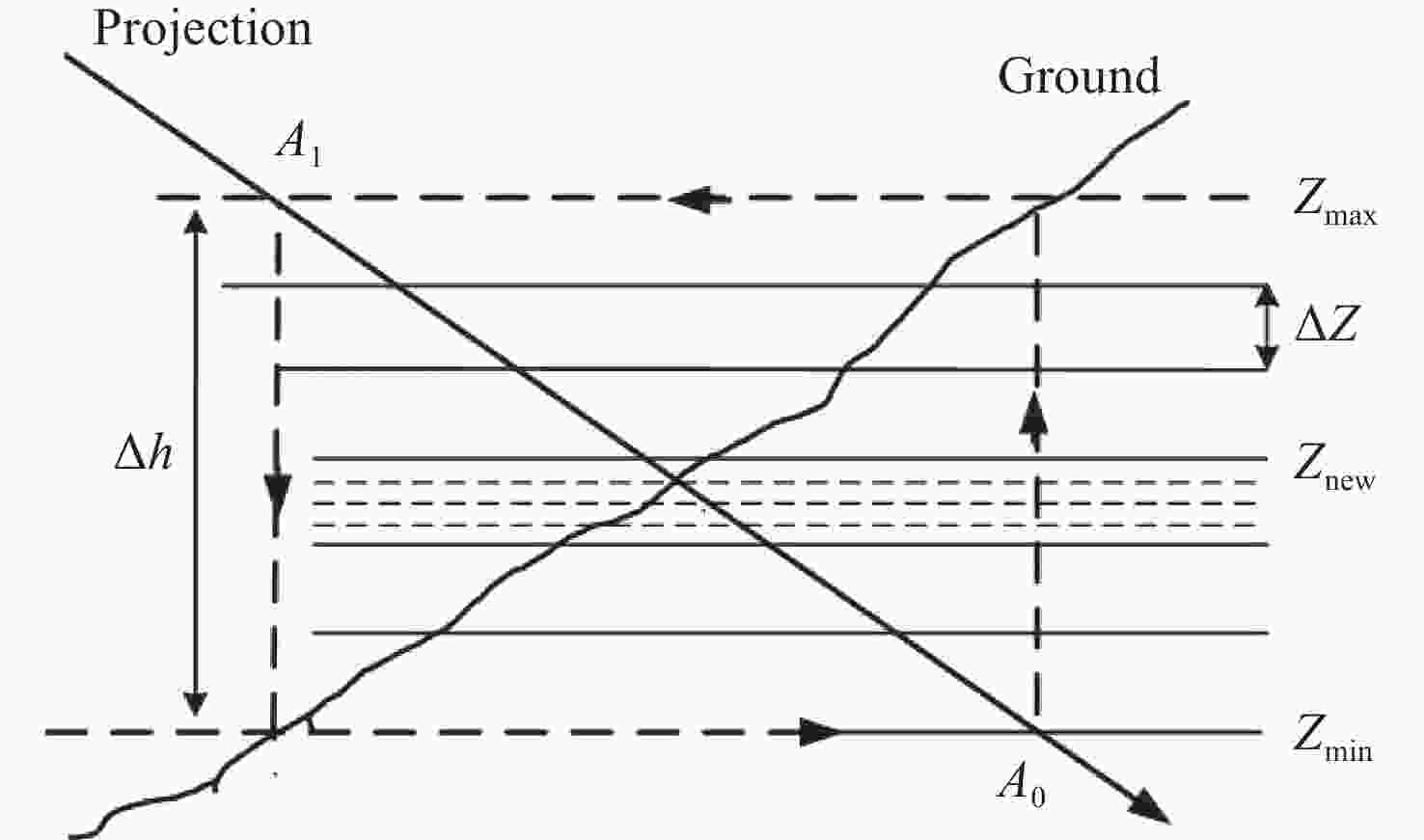
图 9 视向量分段迭代基本原理
Figure 9. Basic principle of visual vector segmentation iterative calculation
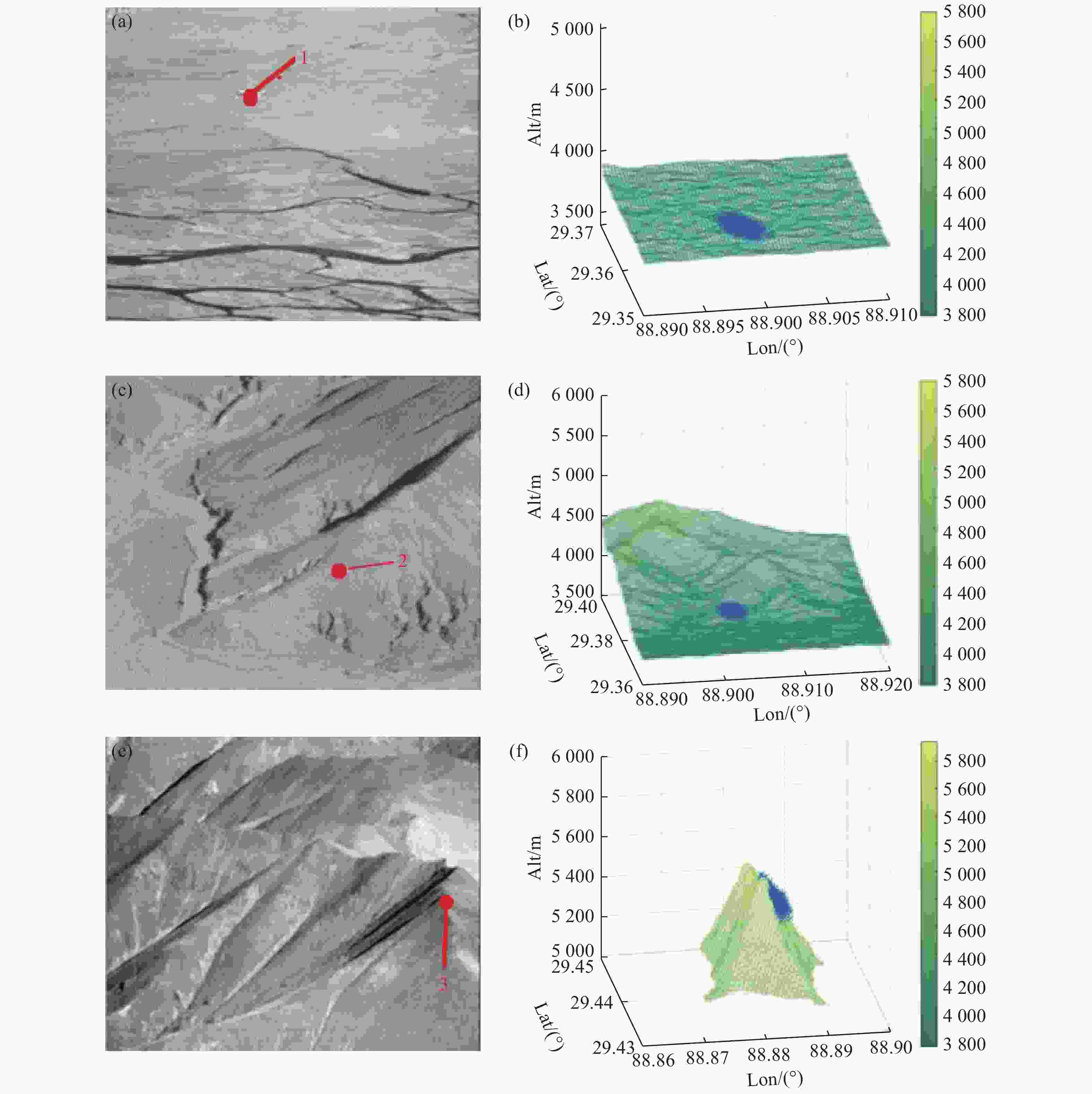
图 13 不同地区航空影像及定位结果。(a)~(b)平原;(c)~(d)丘陵;(e)~(f)山脉
Figure 13. Aerial images of different regions and positioning results. (a)−(b) plain; (c)−(d) hill; (e)−(f) mountain
表 1 视轴指向误差计算中的仿真数据
Table 1. The simulation data for the line-of-sight (LOS) direction error calculation
误差来源 误差σ 载机姿态测量误差 航向方向 0.05° 俯仰方向 0.02° 横滚方向 0.02° 相机框架角测量误差 外框架 0.02° 内框架 0.02° 组合导航系统校准误差 航向方向 0.03° 俯仰方向 0.01° 横滚方向 0.01° 相机框架安装误差 外框架 0.01° 内框架 0.01°  下载: 导出CSV
下载: 导出CSV
表 2 测量变量的名义值
Table 2. Nominal values of the measurement variable
误差变量 平原 丘陵 山地 载机纬度 28.9702° 28.9703° 28.9705° 载机经度 89.0043° 89.0045° 89.0056° 载机大地高 15409 m 15409 m 15409 m 载机航向角 −102.4800° −102.4800° −102.4800° 载机俯仰角 2.8679° 2.8679° 2.8679° 载机横滚角 −0.3876° −0.3876° −0.3876° 外框架 74.6747° 75.3977° 78.7673° 内框架 0.2304° −0.7532° −0.7064°
下载: 导出CSV
表 3 快速迭代法坐标定位误差结果
Table 3. Error results of coordinate positioning by the fast iterative method
地形 平原 丘陵 山地 纬度均方根误差 0.001131° 0.000903° 0.001923° 经度均方根误差 0.000546° 0.000496° 0.000499° 大地高均方根误差 20.3096 m 26.7596 m 36.2531 m 定位均方根误差 137.7469 m 114.3994 m 221.8547 m 圆概率误差 114.7890 m 95.3328 m 184.8812 m
下载: 导出CSV
表 4 不同方法迭代时间统计
Table 4. Iteration times of different methods (ms)
局部穷举法 改进迭代法 视向量迭代法 快速迭代法 平原 4156 3843 3540 3648 丘陵 18610 5269 4712 4530 山地 1249840 86312 36879 20106
下载: 导出CSV
-
[1] 檀立刚. 机载光电侦察设备目标自主定位技术研究[D]. 长春: 中国科学院研究生院(长春光学精密机械与物理研究所), 2012.TAN L G. Research of target automatic positioning technology in airborne photo-electricity survey equipment[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2012. (in Chinese) [2] 王晶, 杨立保, 高利民. 机载光电平台目标定位测量技术[J]. 长春理工大学学报(自然科学版),2009,32(4):531-534.WANG J, YANG L B, GAO L M. Target orientation measuring of airborne EO platform[J]. Journal of Changchun University of Science and Technology (Natural Science Edition), 2009, 32(4): 531-534. (in Chinese) [3] 穆绍硕, 乔川. 小型机载光电平台中基于扩展卡尔曼滤波的地面目标定位算法[J]. 光学学报,2019,39(5):321-331. doi: 10.3788/AOS201939.0528001MU SH SH, QIAO CH. Ground-target geo-location method based on extended Kalman filtering for small-scale airborne electro-optical platform[J]. Acta Optica Sinica, 2019, 39(5): 321-331. (in Chinese) doi: 10.3788/AOS201939.0528001 [4] 王家骐, 金光, 颜昌翔. 机载光电跟踪测量设备的目标定位误差分析[J]. 光学 精密工程,2005,13(2):105-116.WANG J Q, JIN G, YAN CH X. Orientation error analysis of airborne opto-electric tracking and measuring device[J]. Optics and Precision Engineering, 2005, 13(2): 105-116. (in Chinese) [5] 周前飞, 刘晶红, 熊文卓, 等. 机载光电成像平台的多目标自主定位系统研究[J]. 光学学报,2015,35(1):189-203. doi: 10.3788/AOS201535.0112005ZHOU Q F, LIU J H, XIONG W ZH, et al. Multi-target self-determination orientation system based on airborne photoelectric imaging platform[J]. Acta Optica Sinica, 2015, 35(1): 189-203. (in Chinese) doi: 10.3788/AOS201535.0112005 [6] HOSSEINPOOR H R, SAMADZADEGAN F, DADRASJAVAN F. Pricise target geolocation and tracking based on UAV video imagery[J]. The International Archives of the Photogrammetry,Remote Sensing and Spatial Information Sciences, 2016, XLI-B6: 243-249. doi: 10.5194/isprs-archives-XLI-B6-243-2016 [7] 孙辉, 李志强, 张建华, 等. 机载光电平台目标交会定位[J]. 中国光学,2015,8(6):988-996. doi: 10.3788/co.20150806.0988SUN H, LI ZH Q, ZHANG J H, et al. Target localization with intersection measurement for airborne electro-optical platform[J]. Chinese Optics, 2015, 8(6): 988-996. (in Chinese) doi: 10.3788/co.20150806.0988 [8] 徐诚, 黄大庆, 孔繁锵. 一种小型无人机无源目标定位方法及精度分析[J]. 仪器仪表学报,2015,36(5):1115-1122.XU CH, HUANU D Q, KONG F Q. Small UAV passive target localization approach and accuracy analysis[J]. Chinese Journal of Scientific Instrument, 2015, 36(5): 1115-1122. (in Chinese) [9] HELGESEN H H, LEIRA F S, JOHANSEN T A, et al. . Detection and tracking of floating objects using a UAV with thermal camera[M]//FOSSEN T I, PETTERSEN K Y, NIJMEIJER H. Sensing and Control for Autonomous Vehicles. Cham: Springer, 2017: 289-316. [10] STICH E J. Geo-pointing and threat location techniques for airborne border surveillance[C]. 2013 IEEE International Conference on Technologies for Homeland Security, IEEE, 2013: 136-140. [11] 李彬, 丁亚林, 修吉宏, 等. 大倾角远距离航空成像的修正系统误差定位方法[J]. 光学 精密工程,2020,28(6):1265-1274. doi: 10.3788/OPE.20202806.1265LI B, DING Y L, XIU J H, et al. System error corrected ground target geo-location method for long-distance aviation imaging with large inclination angle[J]. Optics and Precision Engineering, 2020, 28(6): 1265-1274. (in Chinese) doi: 10.3788/OPE.20202806.1265 [12] 刘浩. 三轴TDICCD航空相机指向误差及成像质量研究[D]. 长春: 吉林大学, 2022.LIU H. Research on pointing error and imaging quality of the three-axis TDICCD aerial camera[D]. Changchun: Jilin University, 2022. (in Chinese) [13] 杜明鑫, 闫钰锋, 张燃, 等. 基于透镜阵列的三维姿态角度测量[J]. 中国光学,2022,15(1):45-55. doi: 10.37188/CO.2021-0129DU M X, YAN Y F, ZHANG R, et al. 3D position angle measurement based on a lens array[J]. Chinese Optics, 2022, 15(1): 45-55. (in Chinese) doi: 10.37188/CO.2021-0129 [14] 张健, 王健飞, 方新, 等. 航空遥感器平面反射镜系统装调方法[J]. 中国光学,2022,15(3):534-544. doi: 10.37188/CO.2021-0187ZHANG J, WANG J F, FANG X, et al. Alignment method of plane reflecting mirror system for aerial remote sensor[J]. Chinese Optics, 2022, 15(3): 534-544. (in Chinese) doi: 10.37188/CO.2021-0187 [15] 乔川. 基于数字高程模型的高空远距离航空相机对地目标定位技术研究[D]. 长春: 中国科学院大学(中国科学院长春光学精密机械与物理研究所), 2019.QIAO CH. Research on ground target geo-location technology based on digital elecation model for high-altitude long-range aerial camera[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2019. (in Chinese) [16] 乔川, 丁亚林, 许永森, 等. 大角度倾斜成像航空相机对地目标定位[J]. 光学 精密工程,2017,25(7):1714-1726.QIAO CH, DING Y L, XU Y S, et al. Ground target geo-location using imaging aerial camera with large inclined angles[J]. Optics and Precision Engineering, 2017, 25(7): 1714-1726. (in Chinese) [17] SHENG Y W. Comparative evaluation of iterative and non-iterative methods to ground coordinate determination from single aerial images[J]. Computers &Geosciences, 2004, 30(3): 267-279. [18] 郭海涛. 基于卫星遥感影像的单片测图与修测技术的研究[D]. 郑州: 中国人民解放军信息工程大学, 2002.GUO H T. Research on monolithic mapping and inspection technology based on satellite remote sensing image[D]. Zhengzhou: Information Engineering University, 2002. (in Chinese) [19] 莫德林. 航空长焦斜视相机成像模型与几何检校方法研究[D]. 郑州: 战略支援部队信息工程大学, 2018.MO D L. Research on imaging model and geometric calibration method for airborne long focal wiskbroom camera[D]. Zhengzhou: PLA Strategic Support Force Information Engineering University, 2018. (in Chinese) -


 下载:
下载:













计量
- 文章访问数: 488
- HTML全文浏览量: 194
- PDF下载量: 201
- 被引次数: 0
